
2019-2020 Omega 9656
Non-Technical Engineering Notebook
Table of Contents
Allstars United Summer Outreach
Highway Beautification Field Trip
FIRST Global Stem Corps: Team Samoa
Inspire Award, 1st & 2nd Runner Up
Rockwell Collins/Collins Aerospace Innovate Award
Connect Award, Winner & 2nd Runner Up
Resources & Contact Information
Treasury Custom Functions Code
The Team | 2 | ||
3 | |||
4 | |||
9 | |||
11 | |||
12 | |||
76 | |||
Business & Strategic Plan | 79 | ||
80 | |||
83 | |||
84 | |||
89 | |||
96 | |||
102 | |||
Appendix | 103 | ||

Introduction

We are Omega 9656, an FTC robotics team from Evergreen Valley High School in San Jose, California. Over a span of 4 years, our team has gone from a handful of curious friends to students aspiring to become the next generation of STEM leaders. Though our members come from a variety of ages, genders, races, religions, sexual orientations, backgrounds, and abilities, what sets us apart from other robotics teams is our desire for excellence.
That passion is what drives us, no matter the obstacles that we face. Wheels may fall off our robot, our servos might fail, we sometimes do not have enough funds to purchase high quality parts, but we always persevere and learn from our mistakes. While some teams might see each season as a new problem that they have to fix, for us every season is a chance to go further than we have ever gone before, to push boundaries and set the bar even higher.
Members
Rebecca Co-Captain, Design Lead, Secretary Hey there, I’m Rebecca and I’m 16 years old. I’m currently a junior at EVHS and this is my second year doing robotics. As a member of Omega, I lead the members who CAD and do administrative work (formatting the binder and managing the treasury). I love learning, teaching, and reading in my spare time. | |
Trinity Co-Captain, Mechanical Lead, Safety Captain, Administrative My name is Trinity Chen and I’m a junior. This is my third year as a part of this team. I’ve worked on both the mechanical and administrative branches on this team. I was inspired to join robotics and, more specifically, this team, when they came to my middle school for outreach. As mech lead and ex-secretary, I’ve been involved in many different aspects of FTC. | |
Justin Former Co-Captain, Design, Programming Hi, I’m Justin, and I’m a senior at EVHS and this is my fourth year in FTC. I started as a little freshman just hyped to make robots, but today I’m heavily involved in the greater FTC community. I’m very active on the FTC Discord as a moderator and worked over the summer to compile Game Manual 0, a comprehensive technical guide to FTC. I was the Co-Captain, which means I helped manage the team with Nidhir, and I work heavily in design by guiding CAD designers throughout the process. I’m interested in robot design, and I’m planning to pursue a degree in Biology in college. | |
Nidhir Former Co-Captain, Mechanical, Programming Hi! My name is Nidhir Guggilla and I’m a senior at EVHS. I’ve been part of Omega since I started high school four years ago. I joined robotics because I was interested in programming and wanted to see my code be applied in real life, but ended up falling victim to the allure of building the robot itself. From there, I became the mechanical lead and co-captain, a position that allowed me to be involved in all aspects of the team and train new members so they can go on to succeed in an activity I enjoy so much. | |
Aditya Web Developer, Business, Programming, Mechanical Hello friends! My name is Aditya Mogli, and I am one of the many freshmen on the team. I attend high school at EVHS and this is my first year on a robotics team in general. I mainly work on the code side of things (which I am very interested in), but I also do mechanical and handle business things like emails to sponsors, outreach, etc. I am so grateful that I am on this team and look forward to working with this team to succeed. | |
Afra Web Developer, Business, Programming Hello! My name is Afra and I am a junior in EVHS. This is my second year in Omega, and I’m excited to learn more. Last year I was in the Mech team, but this year, I wanted to learn new things, so I switched to the Programming Team. I hope to learn more and do well for the challenge this year! |



Amaan Mechanical Hello there, my name is Amaan, and I am a freshman here at EVHS. I am currently helping assemble our robot but have previously learned design and want to work on that too. Even though I’ve only been here for a short time, I have expanded my knowledge significantly. | |
Amogh Programming Lead In-Training Hello! I am Amogh Ramachandra, a freshman in EVHS Robotics. I started Robotics this year on the Omega team. This year I have spent the majority of my time learning how to code. Being on this FTC Omega team has definitely grown my interest in programming. In the time I spend with this team I hope to help the team grow and be successful. | |
Ananya Web Developer, Design, Programming Hi! My name is Ananya. I’m a junior (even though everyone thinks I’m in middle school), and this is my second year with Team Omega. I joined originally because I wasn’t really sure what I wanted to do after highschool, and robotics seemed pretty interesting. I stayed because of the amazing community we have in Omega, and for everything I have yet to learn from my teammates. I’m really excited to play a bigger role in our team, and I’m ready for this year’s challenge. | |
Aravind Mechanical Lead In-Training Hello, I am Aravind, a 14 year old 9th grader in EVHS. This is my first year in Team Omega and it has taught me a great deal on teamwork and mechanical applications. | |
Atul Mechanical, Public Relations In-Training Hello! My name is Atul Nair, and I am one of the new recruits on this team. I’m a freshman at EVHS and this robotics team is helping to enhance my first year as a high schooler. I work on building the actual robot, and I have also learned about designing the robot. I enjoy working on this team and look forward to continuing to work on this team. | |
Josephine Historian, Mechanical My name is Josephine Luong and I am 16 years old, a junior at EVHS. I have been on this team for 3 years. I occasionally update the binder and attendance while assisting in the actual building of the robot. I draft the pencil designs for the robot and give them to our CADer to CAD. I joined at first after being influenced by a demonstration done in my middle school. At first, I had the intention of joining the coders. I quickly realized soon after joining that I wasn’t cut out for coding so I chose to join the mechanical side. | |
Jyotiprakash Mechanical, Historian In-Training, Secretary In-Training Hello, my name is Jyotiprakash Jonnalagadda, and I am one of the many freshmen newly recruited on the team. I attend EVHS and have thoroughly enjoyed my first year on this team. I work on mechanical jobs and organizing the parts of the robot that can be used for later applications. This team has improved my ability to work in a team and with new people in an older age group. So far, this year has been spectacular! | |
Rohan Mechanical My name is Rohan and I’m a sophomore at Evergreen Valley High School and I am on the mechanical team of our team Omega. I am the precious sophomore of the group. | |
Vishrut Mechanical Lead In-Training My name is Vishrut, and I am a freshman. This is my first year on the team and it has taught me a lot about teamwork and mechanical applications. | |
Vivaswat Programming Hi! I’m Viva, a senior at Evergreen Valley High School. This is my first year on the team, which I joined to improve my coding skills. But, being on this team taught me a lot more than coding and I’ve had a lot of fun doing robotics. |








Mentors & Mascot
Dusty Mascot Bark! Bark! I’m Dusty and I like chewing on things like tennis balls. I also like licking nice humans. I don’t like the dog next door and I love eating food wrappers, even if they make my stomach hurt. | |
Kevin Tran Mentor My name is Kevin Tran and I’m 19 years old. I am currently a sophomore attending San Jose State University, majoring in aerospace engineering and minoring in business. I was the previous captain and ME/EE lead for FTC Omega 9656 as well as a previous officer for FRC Prototypes 2854. | |
Parimala Narayan Mentor Parimala Narayan is Nidhir’s mom. She is currently a contractor working at Apple and helps Omega by providing rides, food, and a place to meet. She also helps us organize carpools and coordinates the other Omega parents through WhatsApp. | |
David Chen Mentor David Chen is Trinity’s dad. He currently works at Power Integrations, a semiconductor company. He helps our team by providing rides and signing us into competitions. |





Organization

Administrative
The administrative team is in charge of finances, outreach, communications (with the school and other teams), working with sponsors, and marketing.
Mechanical
The mechanical team works on putting the robot together, incorporating our electrical and hardware components based on our design for FIRST’s challenge.
Programming

The programming team codes the autonomous phase (in which the robot runs on preset instructions) and the TeleOp phase (in which the robot is responsive to gamepad inputs).
Design
The design team creates visual models of our robot using CAD software to help ensure that all the parts will work together before a component of the robot is built.
Business/Public Relations

The business/public relations team collaborates to send emails to potential sponsors, set up fundraisers, and work alongside the administrative team to fill out grant applications. They also manage the website and social media. This includes adding posts and updating static pages.
Outreach
Overview
In past seasons we focused on improving our technical knowledge over our community outreach, but this year, we pushed ourselves to be better and tried to reach out to our community in better ways by teaching robotics to absolute beginners and people working in the STEM industry.

For example, we went to local middle schools to introduce kids to FIRST and what we do in robotics. We have also collaborated with Allstars United, attending weekly meetings to tutor new FTC teams. We also mentored an international FTC team in the American Samoa through FIRST Global Stem Corps and have worked with STEM professionals to apply our skills in robotics to solve real world issues such as people littering on highways.
This year, we had 4 areas of focus for our outreach: Local Community, FTC Community, Team Mentoring, and STEM Professionals. Local Community outreach involves introducing members of the Evergreen community where we live to robotics, especially absolute beginners. FTC Community outreach centers on helping our peers build their technical skills. Team Mentoring outreach focuses on offering technical advice to other FTC teams that are either just starting out or are part of FIRST Global. Lastly, STEM Professionals outreach involves working with professionals in the STEM industry to solve real-world problems using robotics. We grouped each of our outreach events, programs, and resources in the chart below by focus area.


BME STEM Night
Location
Evergreen Valley High School
Hosted by Biomedical Engineering (BME) Club
Date
4/5/19
Summary
Focus: Local Community
People Reached: 7
Man Hours Spent: 3
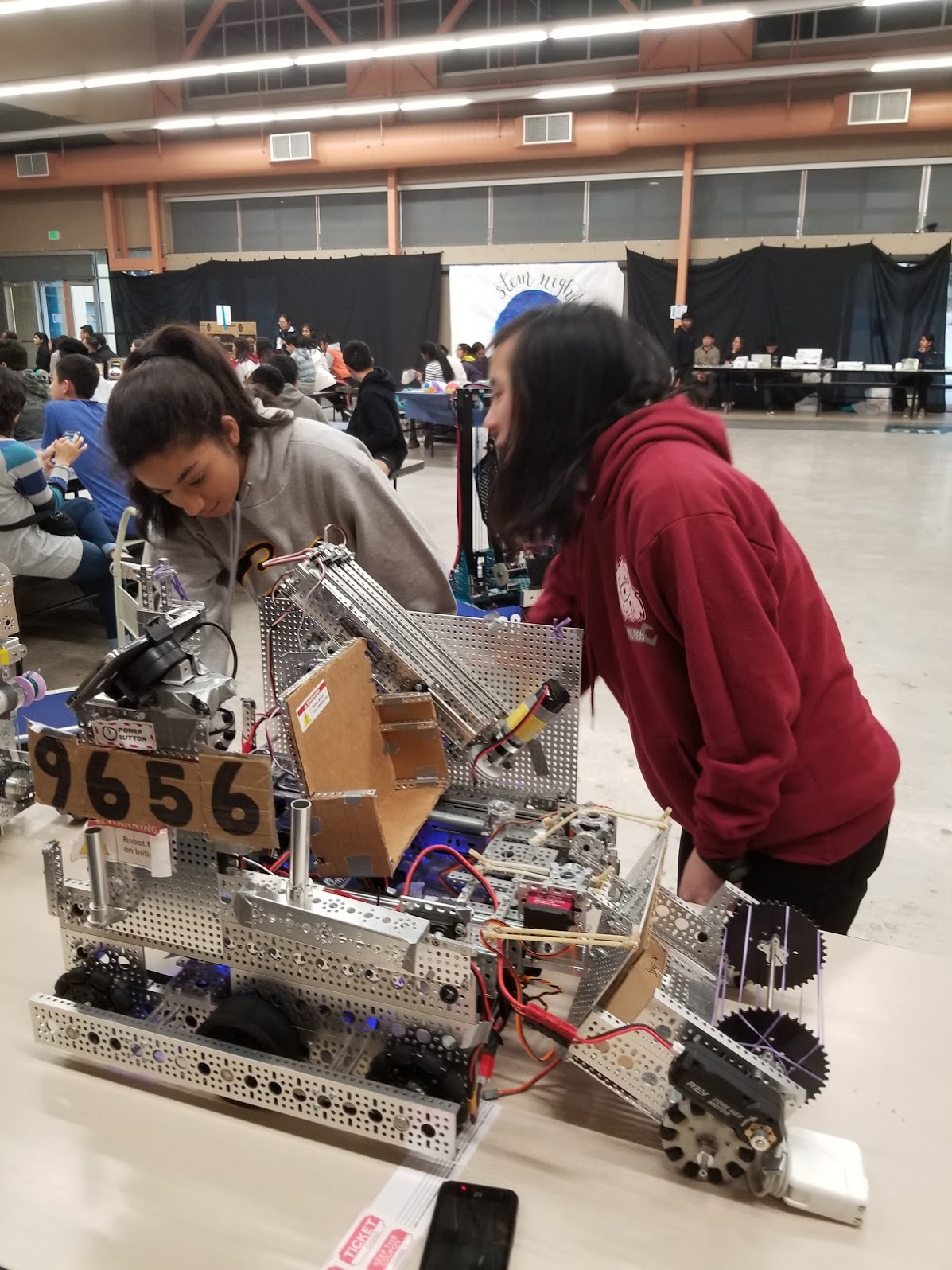
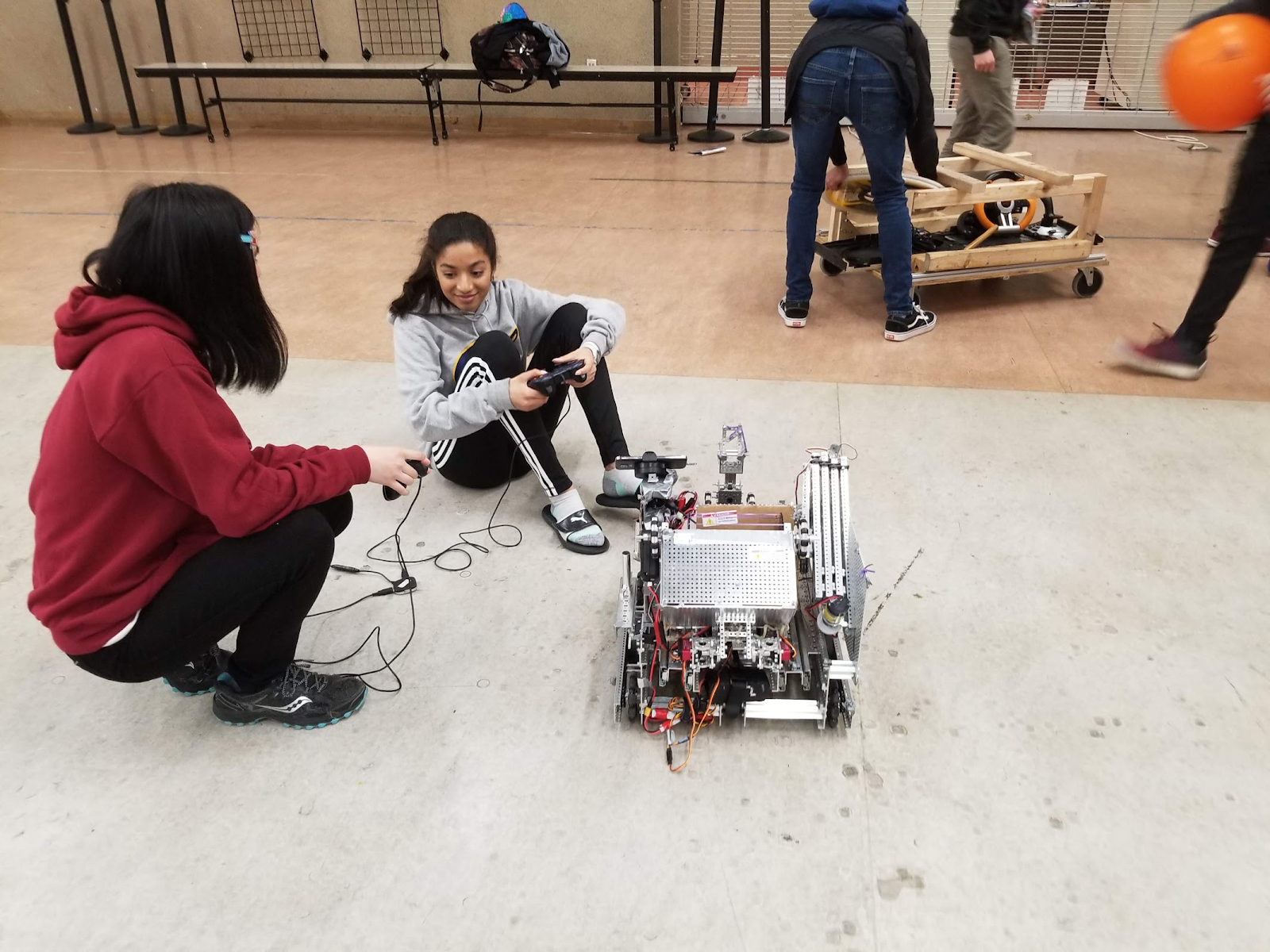
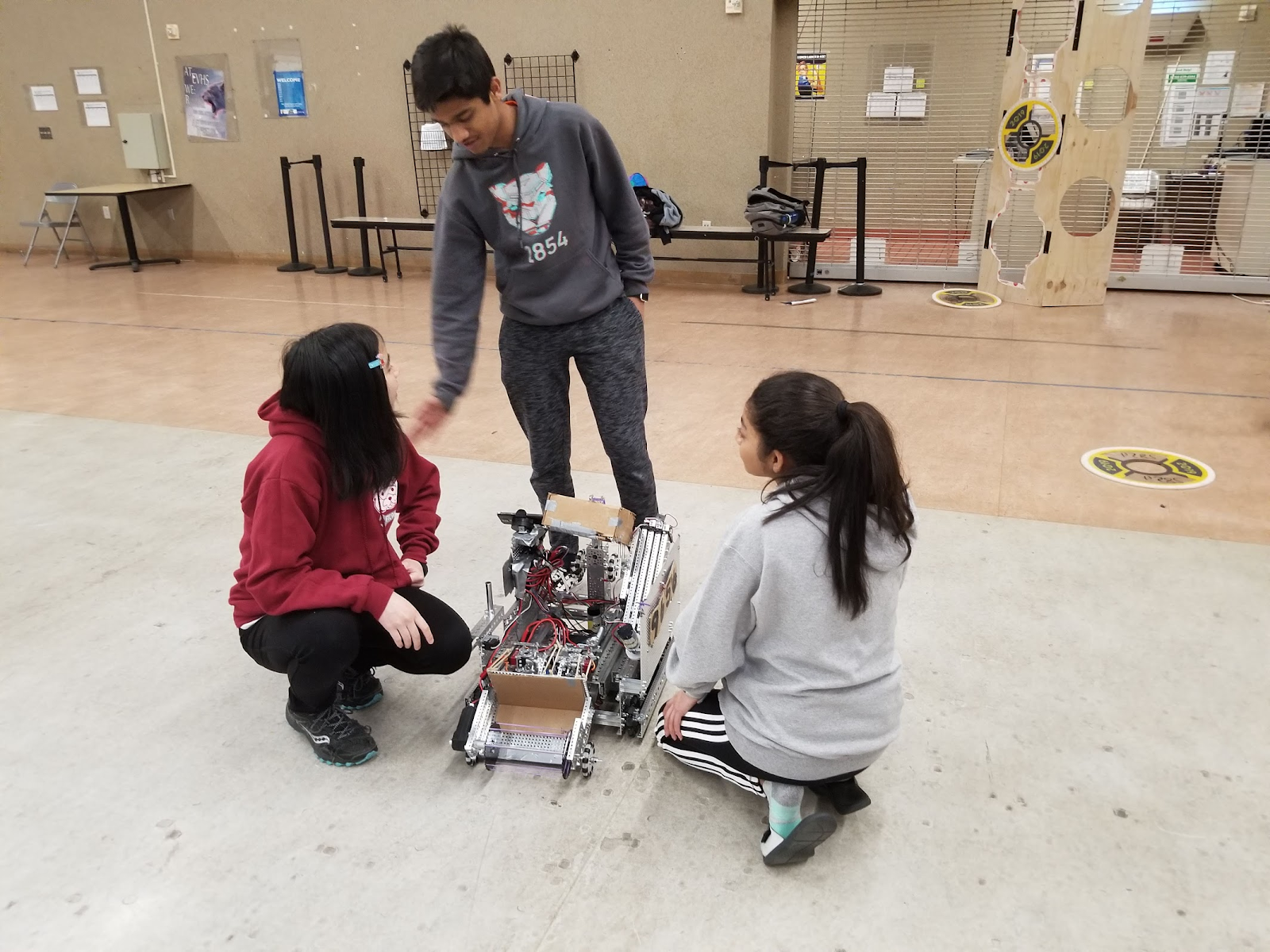
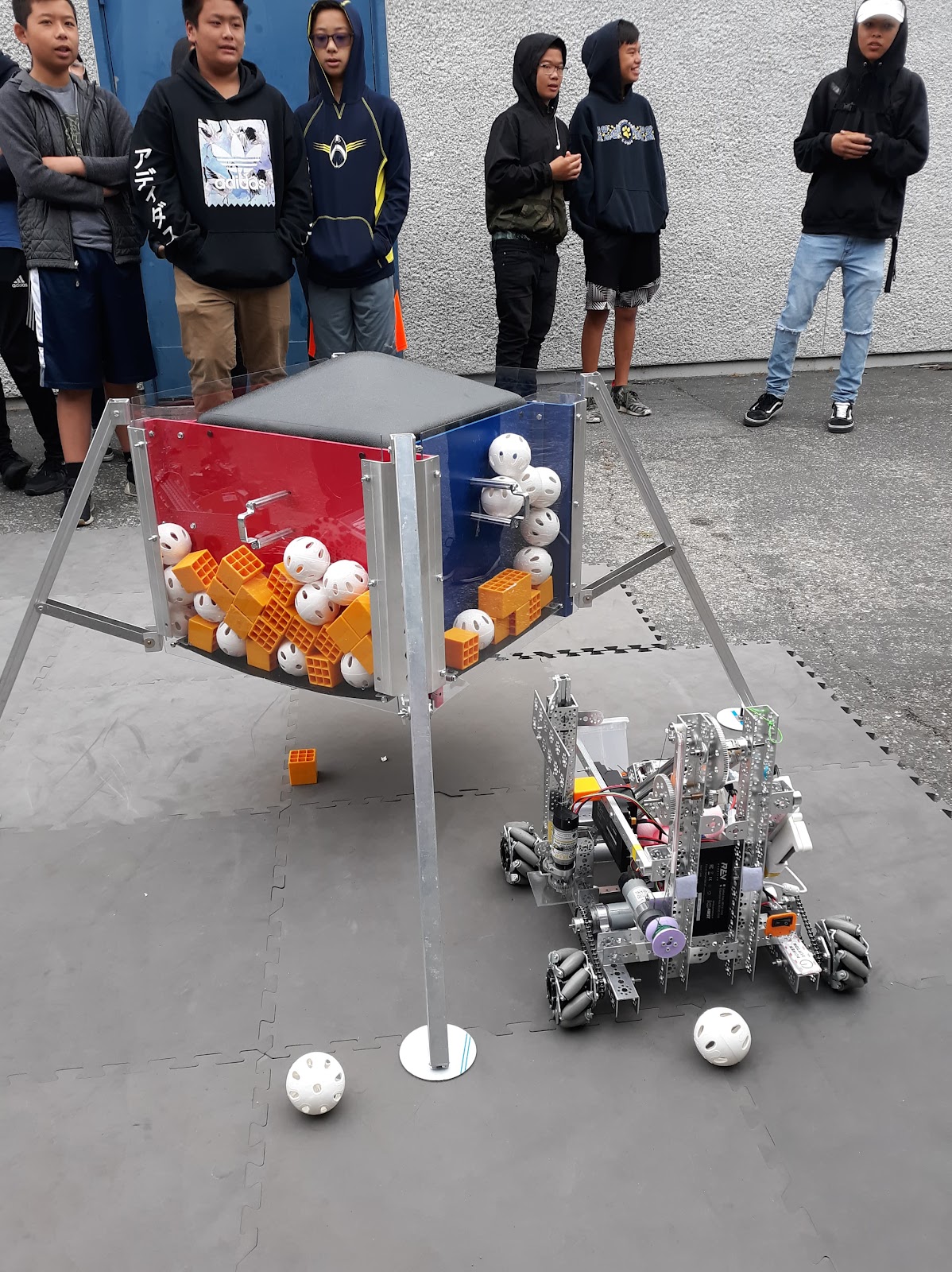
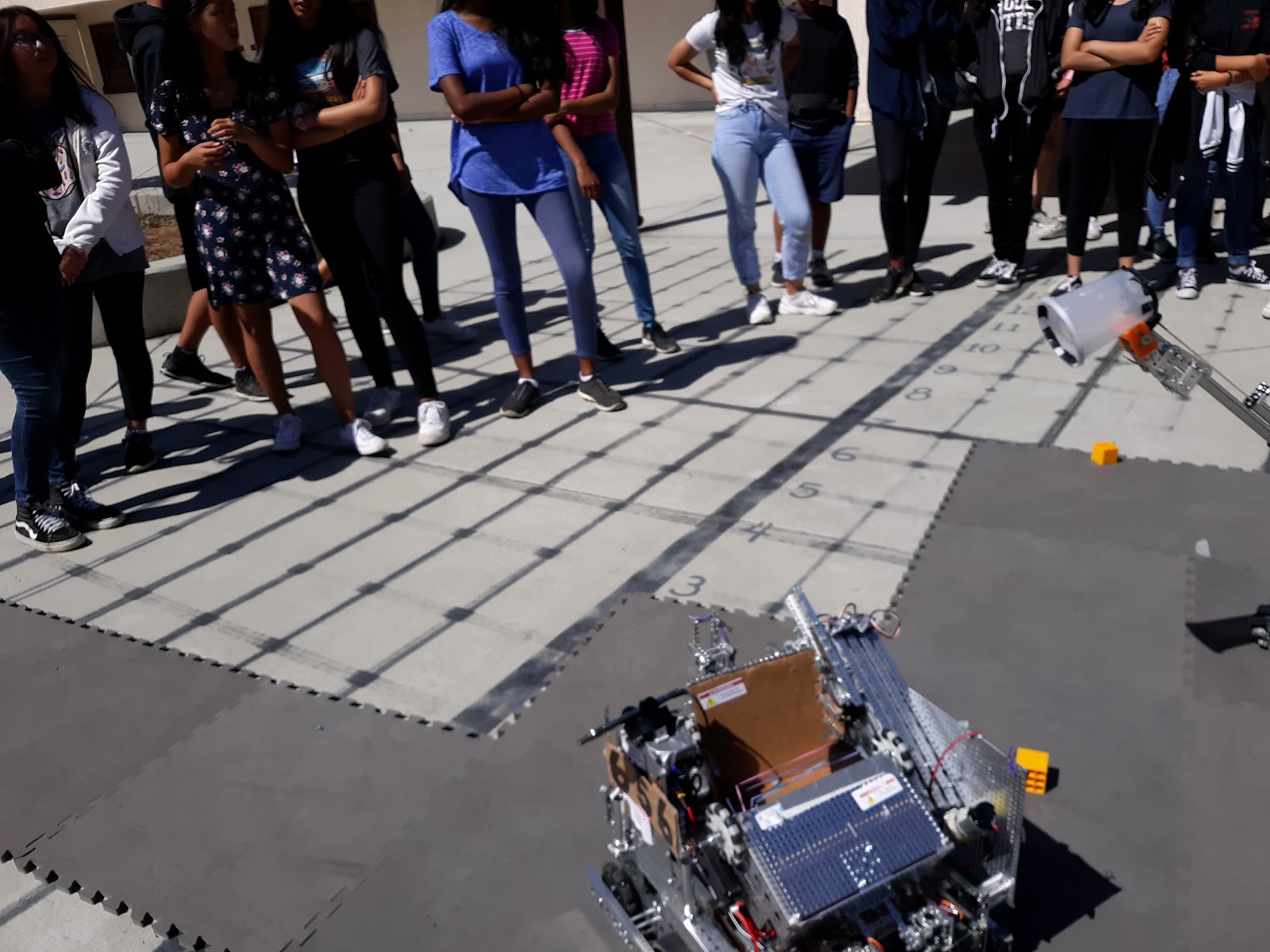
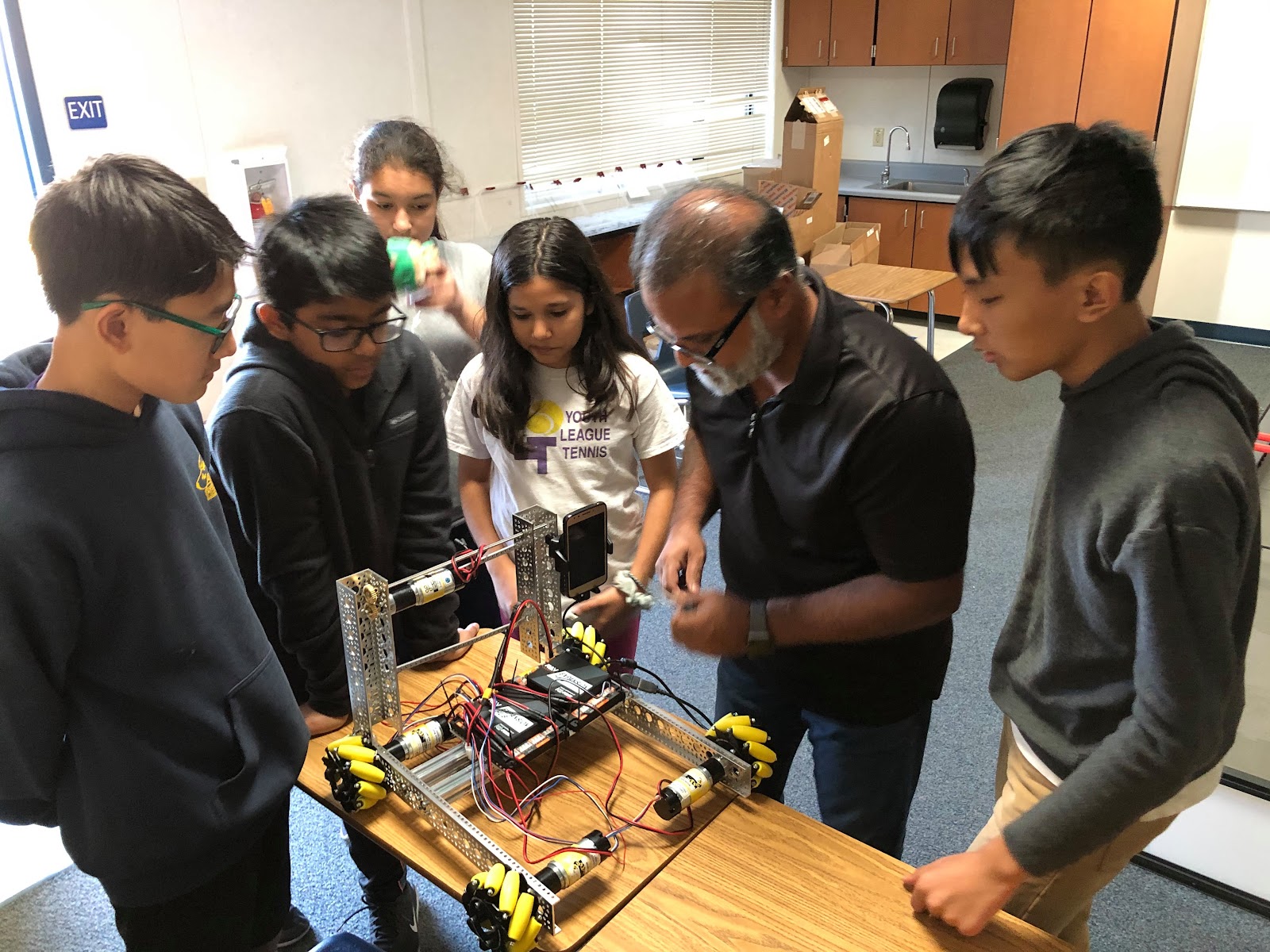
Every year our high school’s Biomedical Engineering (BME) Club hosts an event called STEM Night, which includes different STEM-related activities and allows other STEM-related clubs on campus to set up booths. Omega decided to set up shop that evening. We brought out our regional’s robot for the Rover Ruckus (2018-2019) season, showcasing it to curious students and parents and also answered any questions that attendees had about robotics or FTC in general. We also let people test drive the robot and explained how each of its mechanisms worked.
Impact
Although STEM Night was a relatively small event, we were able to talk about robotics more in-depth to anyone who had questions, and each person we reached walked away from our table with a greater understanding of what exactly a robotics team does. By having a table at STEM Night, we were also able to reach out specifically to members of our own school and encourage them to join our team or just robotics in general, as well as sparking their interest in a STEM career by letting them drive the robot.
Photos






Quimby Oak Outreach
Location

Quimby Middle School
Date
6/3/2019
Summary
Focus: Local Community
People Reached: 450
Man Hours Spent: 18
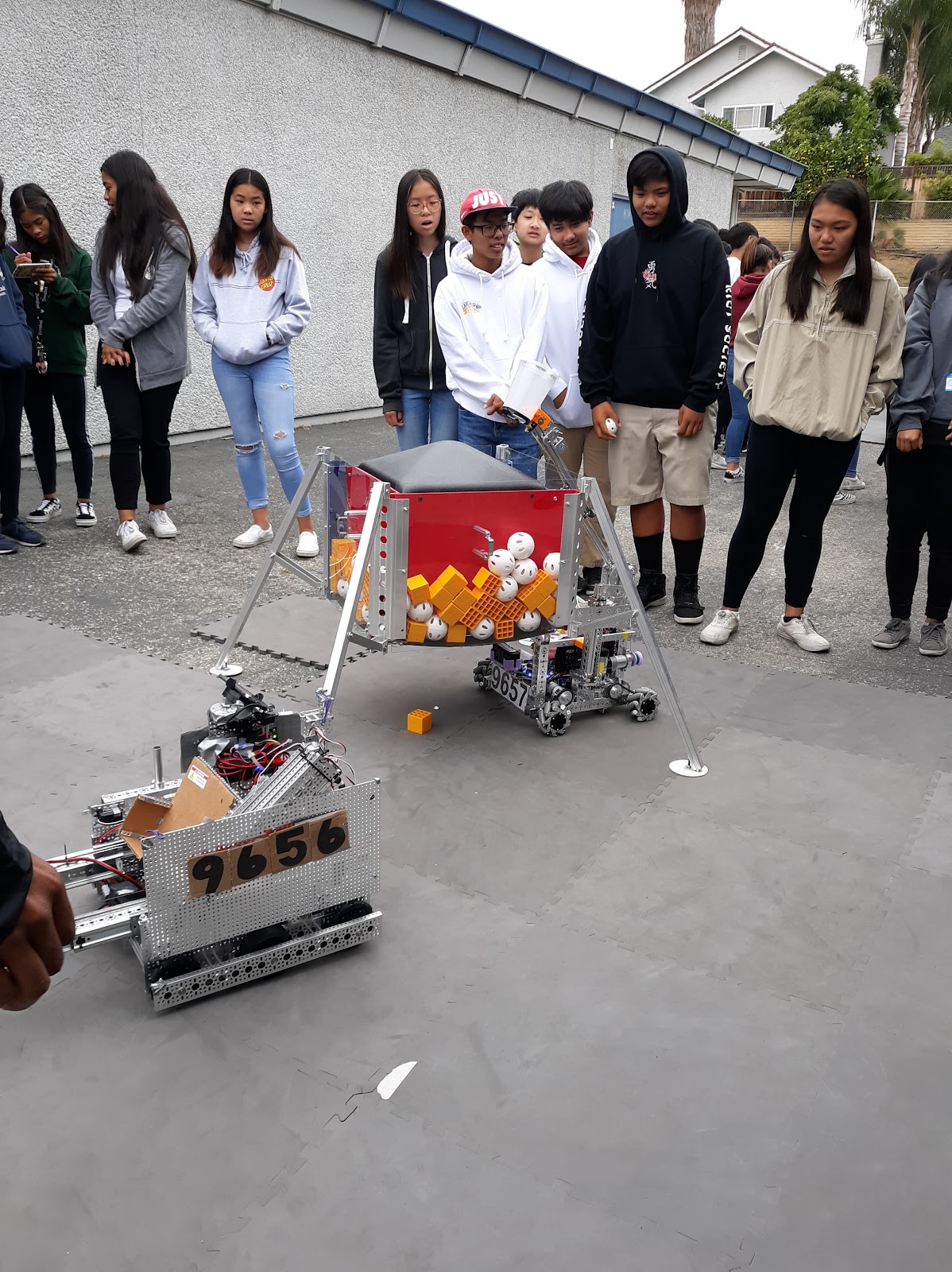
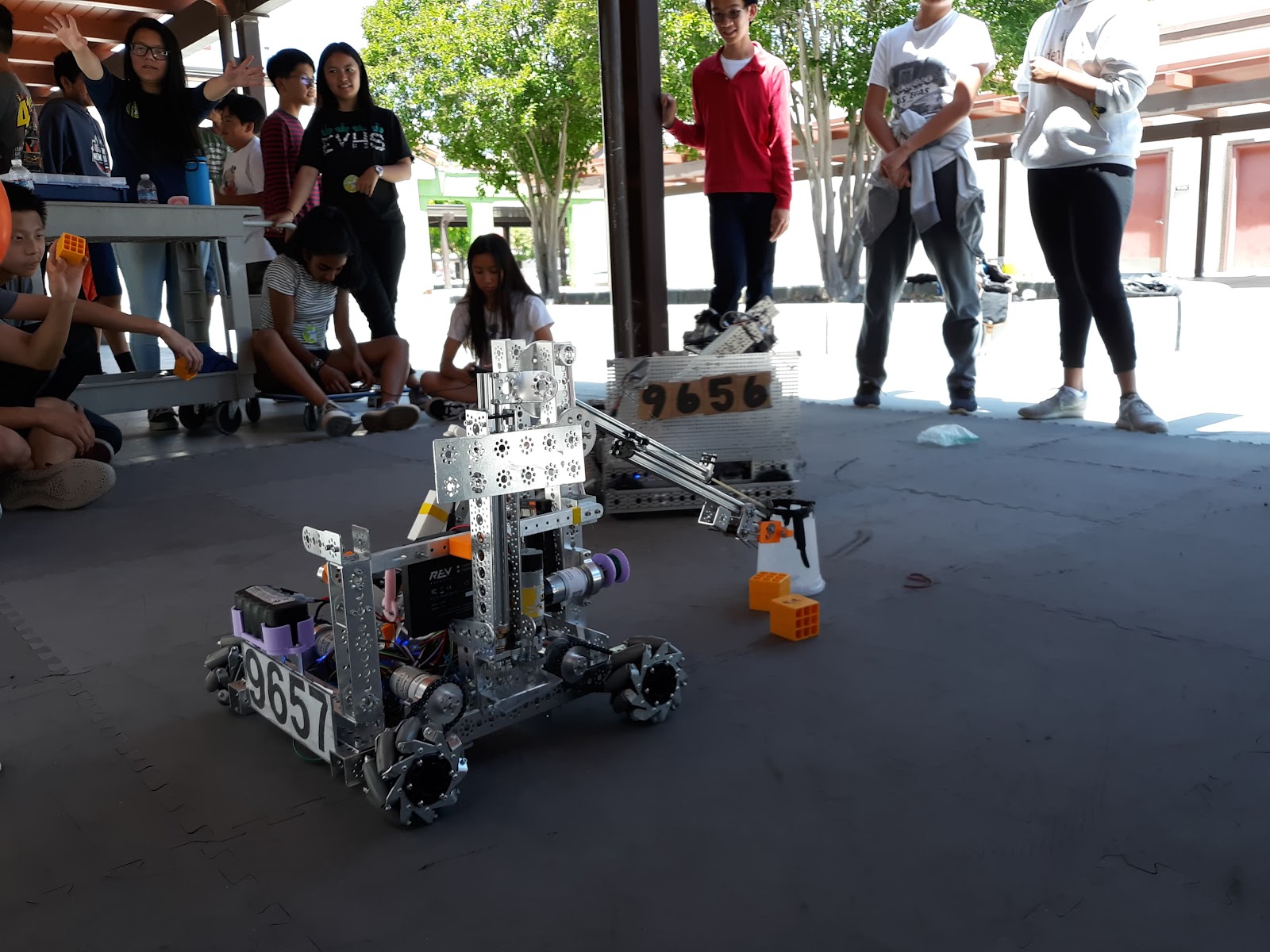
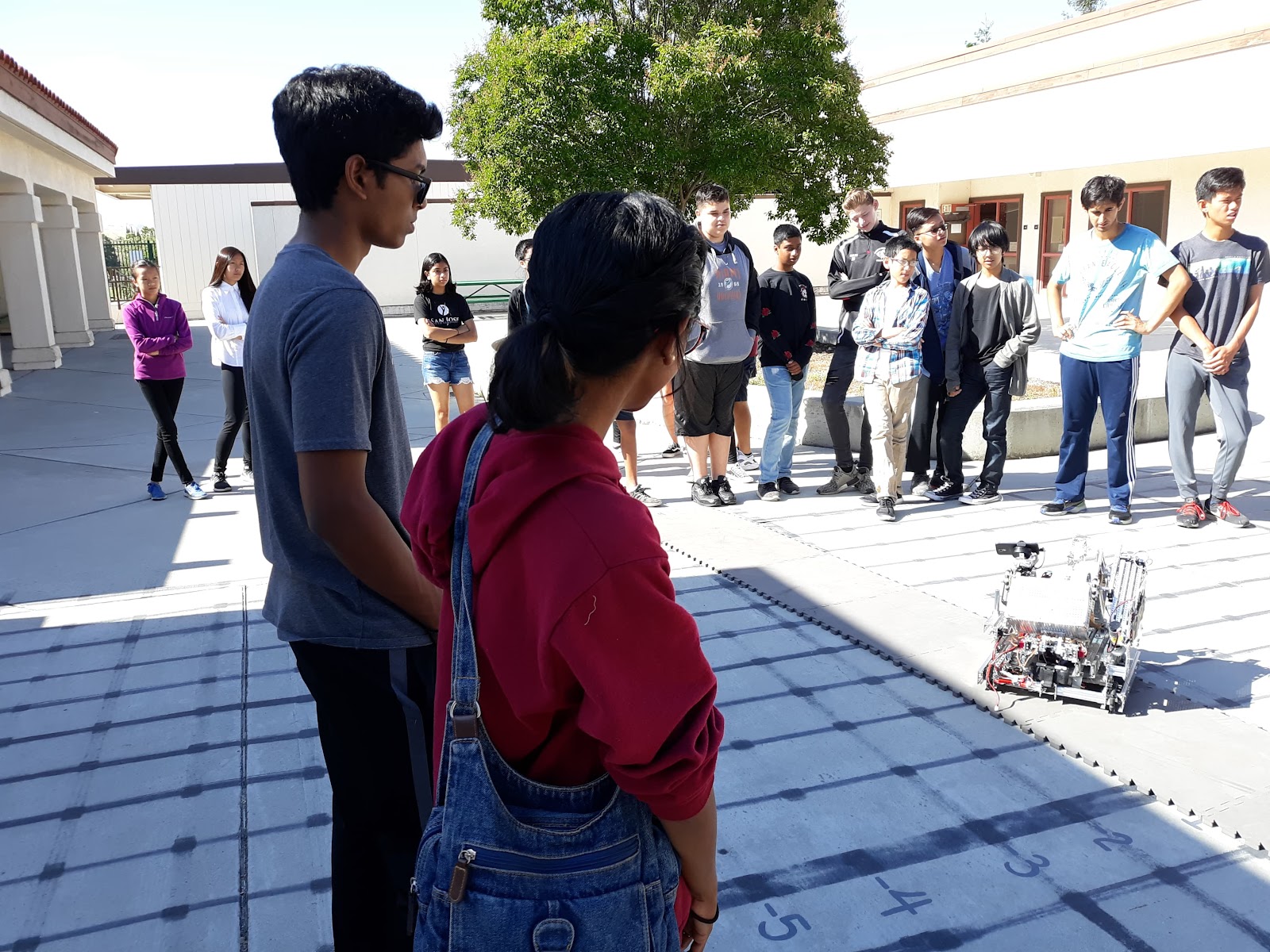
Today, a few of us (along with some members of FRC 2854 The Prototypes and FTC 9657 Athena) went to Quimby Oak Middle School. We chose to visit Quimby because the majority of its students will eventually attend our high school. There, we gave a powerpoint presentation about our school’s FTC and FRC teams, followed by a demonstration of our robot (Dusty IV) from last year’s competition (Rover Ruckus) and a demonstration of FRC 2854’s robot for comparison. We allowed people to drive the robot through an obstacle course, where they had to collect two minerals at one end and then deposit them in the lander at the other. This obstacle course doubled as a race, where our robot would compete against Athena 9657’s for the fastest time. However, it may not have been the best idea to let the kids drive around on their own, due to their lack of experience. One kid accidentally bumped into another kid with the robot, fortunately no one got hurt. However, their clumsier driving led to damages in our intake and outtake systems.
Impact
There were 5-10 kids who seemed interested in our robot and joining our team, which was great. They would get involved through asking questions and participating in our demonstration. Besides that, since we partnered with our sister teams and with the Quimby science teachers when organizing this event, it almost doubled as business outreach. We were able to discuss ways to improve each other’s robots. And we were able to introduce FIRST to the science teachers (many of whom seemed quite interested in it) and get their input on our designs and whatnot. Overall, the day was a success with just a few minor hiccups.
Pictures









Chaboya Outreach
Location
Chaboya Middle School
Date
6/5/2019
Summary
Focus: Local Community
People Reached: 540
Man Hours Spent: 24
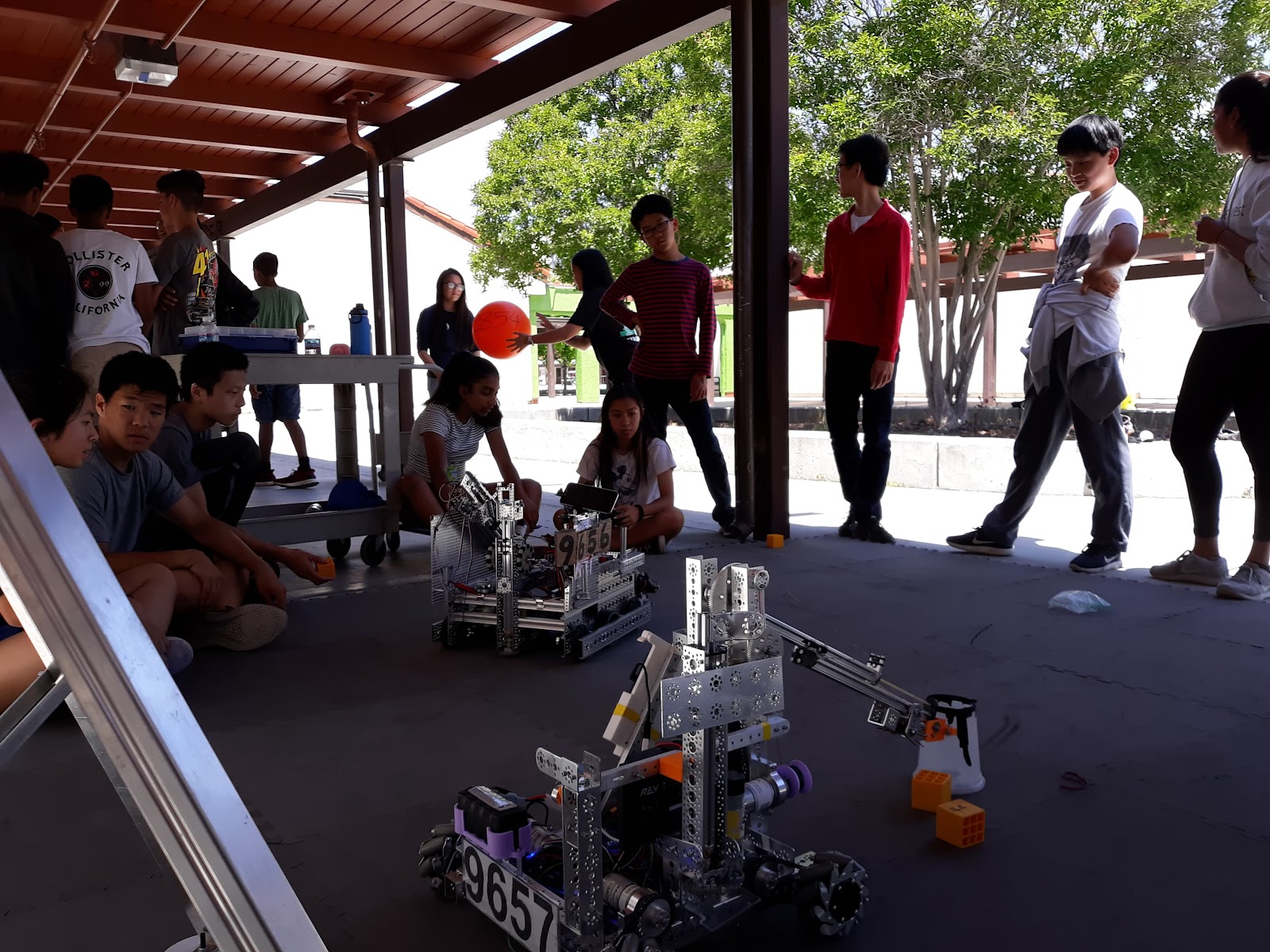
We pretty much did the same thing we did at Quimby but at Chaboya this time. Like Quimby, a lot of Chaboya's students feed into our high school. Again, we gave a presentation about FIRST and our school’s robotics club and a demonstration of the three robots. Because we’d just done this a couple days before, we did a better job: transitioning between the presentation and the demonstration was a lot smoother and we knew what worked well and what didn’t.
Because this event was only two days after the Quimby one, we didn’t have time to fix all the stuff that had broken on our robot. Instead, we worked with Athena to create a new game for our demonstration. We couldn’t intake or outtake like we had earlier, so we just had the students race the robots on a windy path of tiles (they were judged on both speed and accuracy). Luckily, this time, there were no collisions, which might have been in part due to the simpler task. Another nice thing was that since we’d designed an activity wherein our intake and outtake mechanisms were no longer necessary, there was no need for us to fix our robot. As such, we had more time to bond with Athena, one of our sister teams, through a game of battle bots and by riding around on their cart.
Impact
We formed better relations with Athena (though also developed a slight rivalry), which means our teams can potentially help each other out more in the future. We actually talked about ways we could share resources so that we both benefit. For example, they were planning on buying a 3D printer next season and, as this is something we too were looking into, we could possibly share instead (saving both of us some money). In addition, we arguably got more interest at Chaboya than Quimby, so hopefully this incoming batch of freshmen will choose to join our team.
Pictures






Allstars United Summer Outreach

Location
Chaboya Middle School
Allstars United Summer Camp
Date
7/12/2019
Summary
Focus: Local Community
People Reached: 60
Man Hours Spent: 9
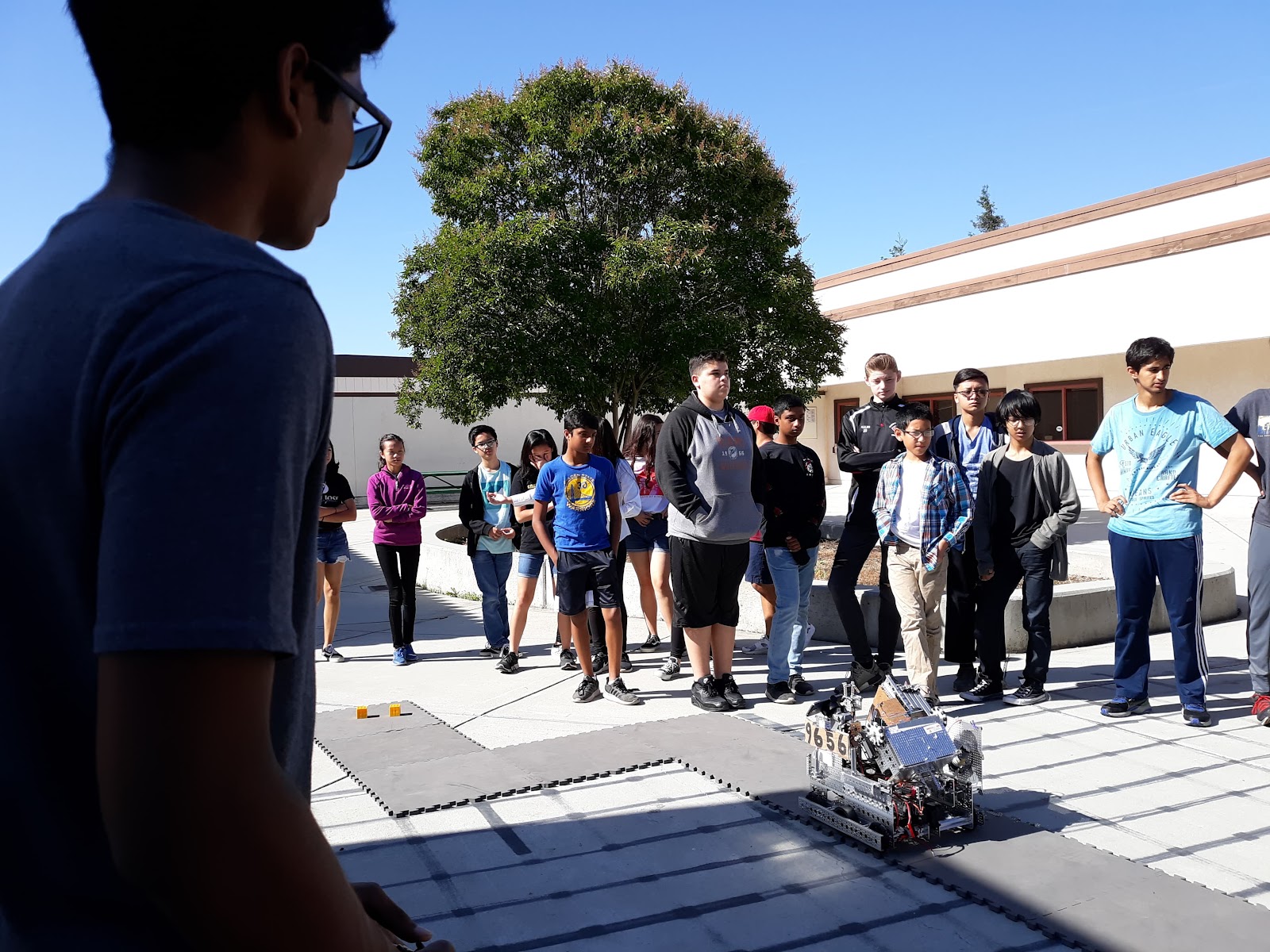
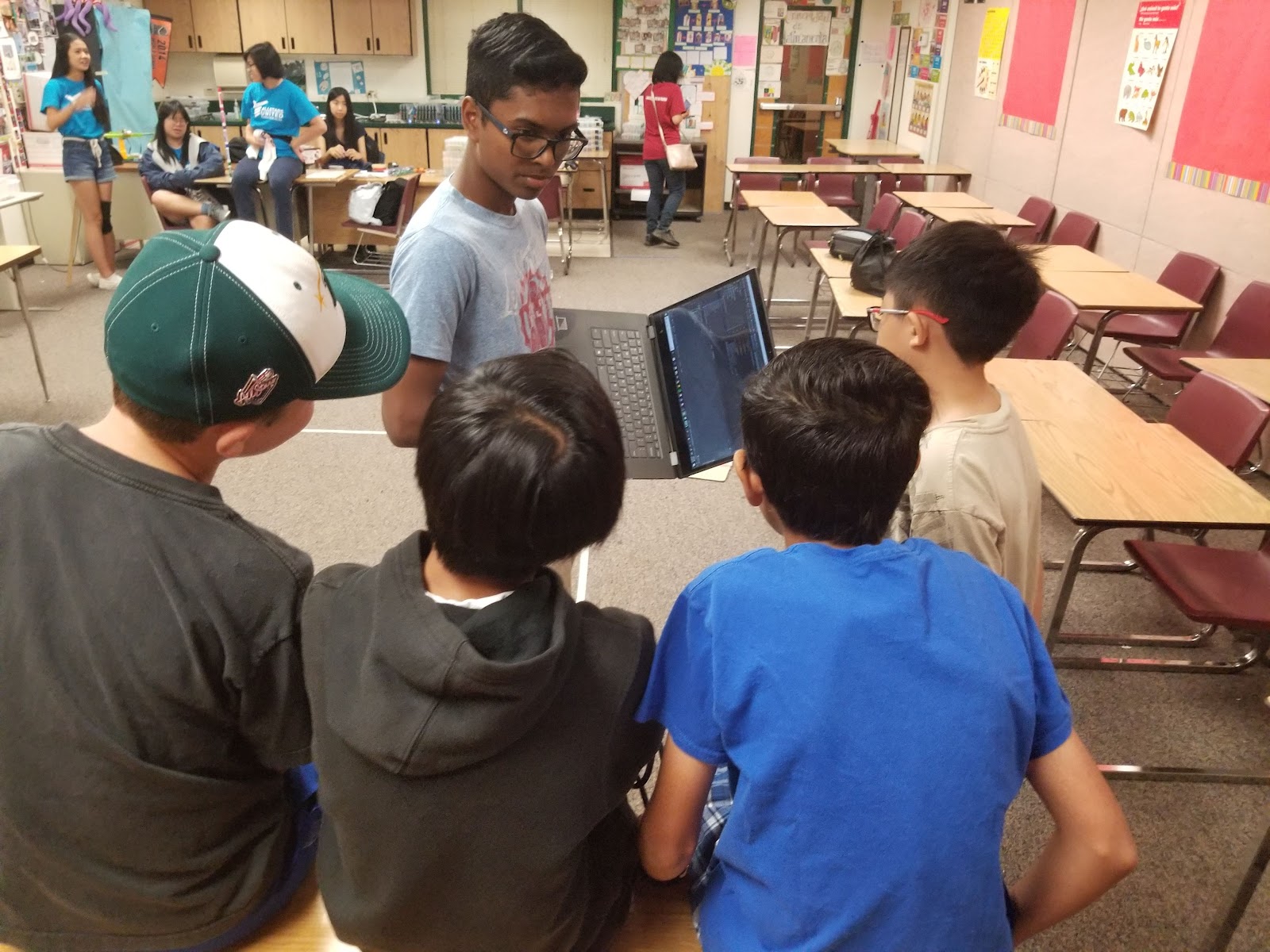
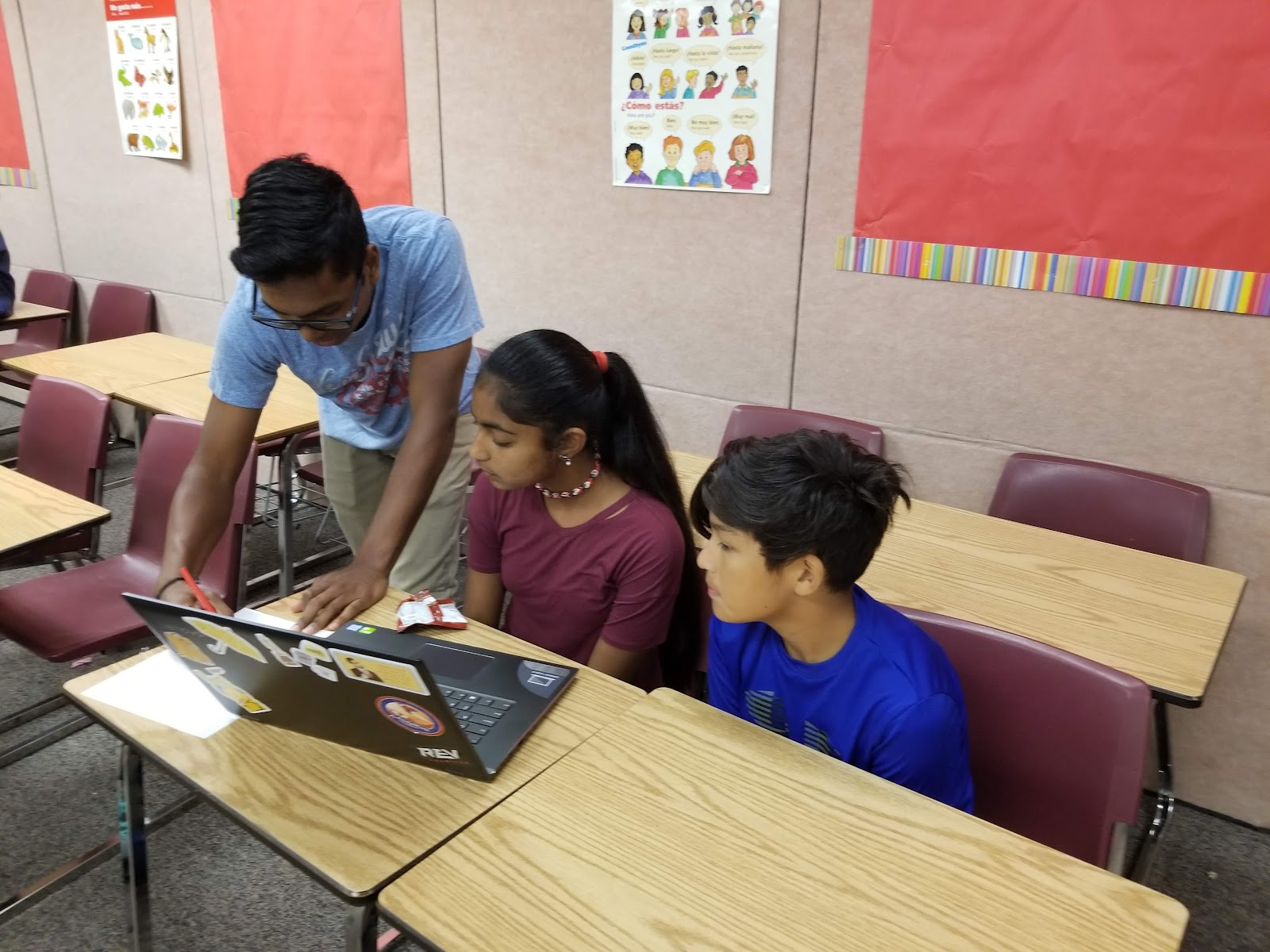
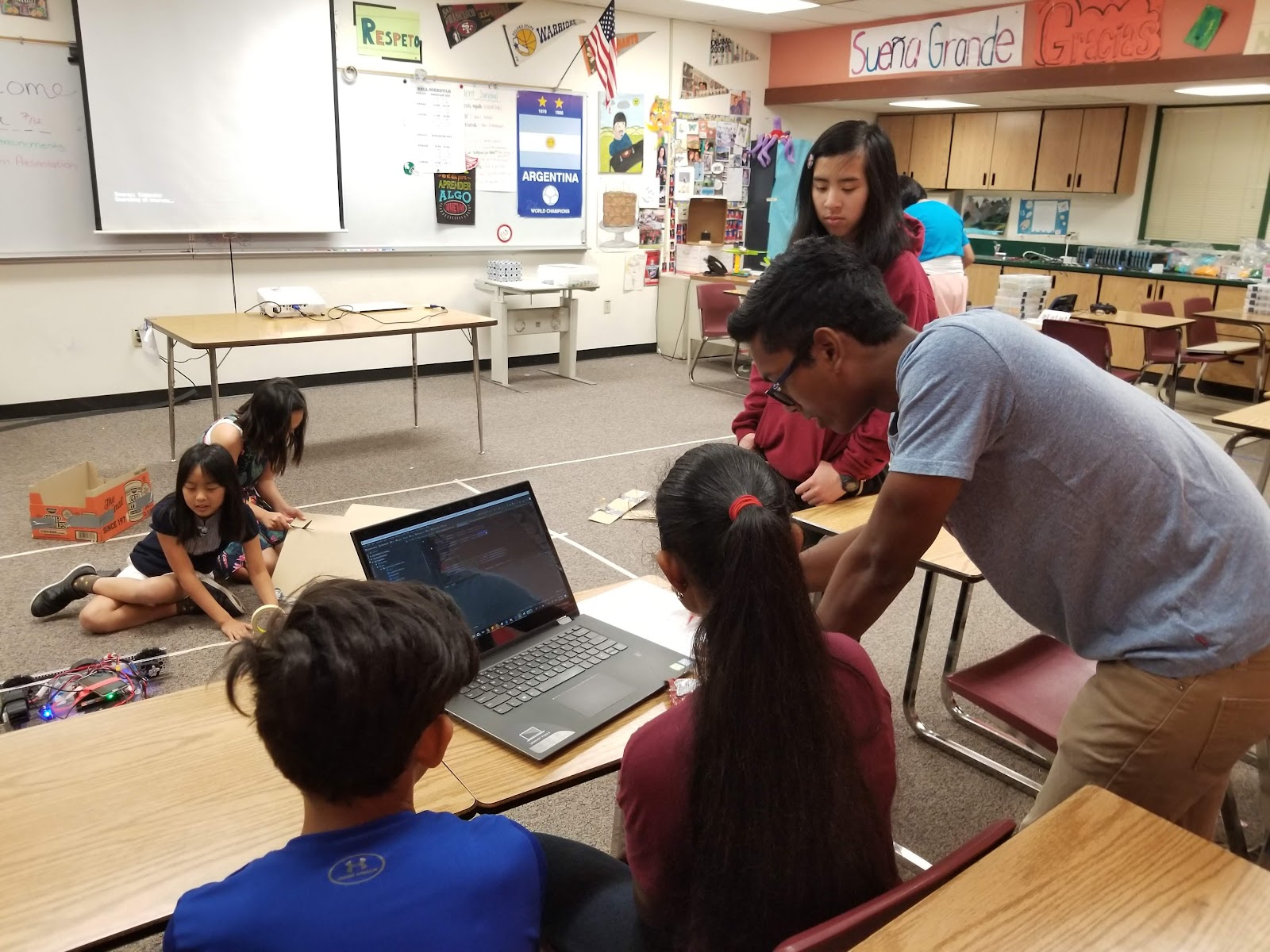
We presented the slideshow we had made yesterday to three different classes. Each class contained students of varying ages: one had seventh and eighth graders, another had sixth graders, and the last had fourth and fifth graders. We started out each class introducing the kids to FIRST, FTC, and Omega using Google Slides.
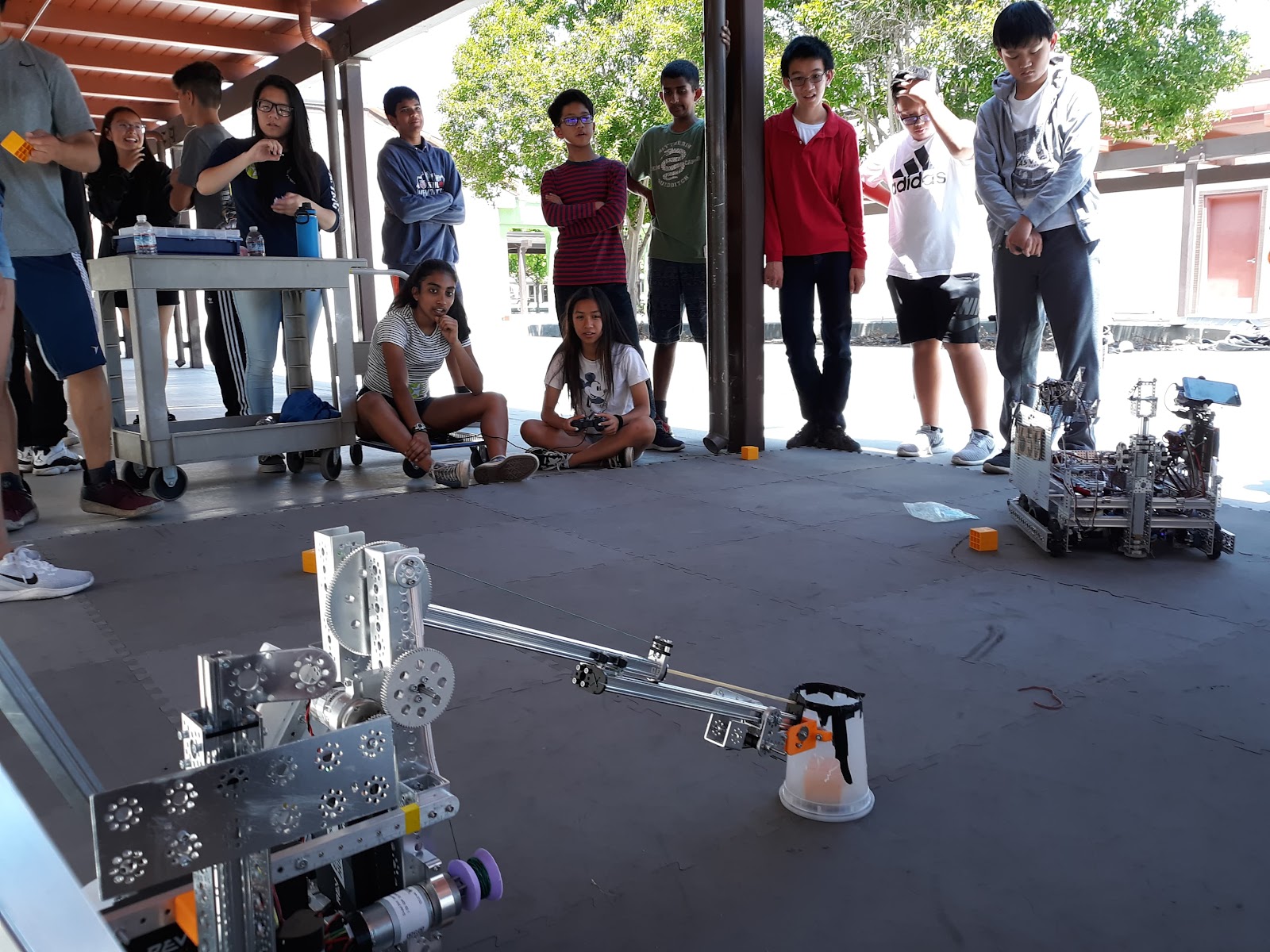
After the presentation, we did a few more interactive activities. First, we let them drive around the robots we had brought. A lot of kids really seemed to enjoy this (almost everyone participated), which was quite different from the level of engagement we received from the students at Quimby and Chaboya a month or so ago. Back then, there were people that were always eager to drive, but only a few.
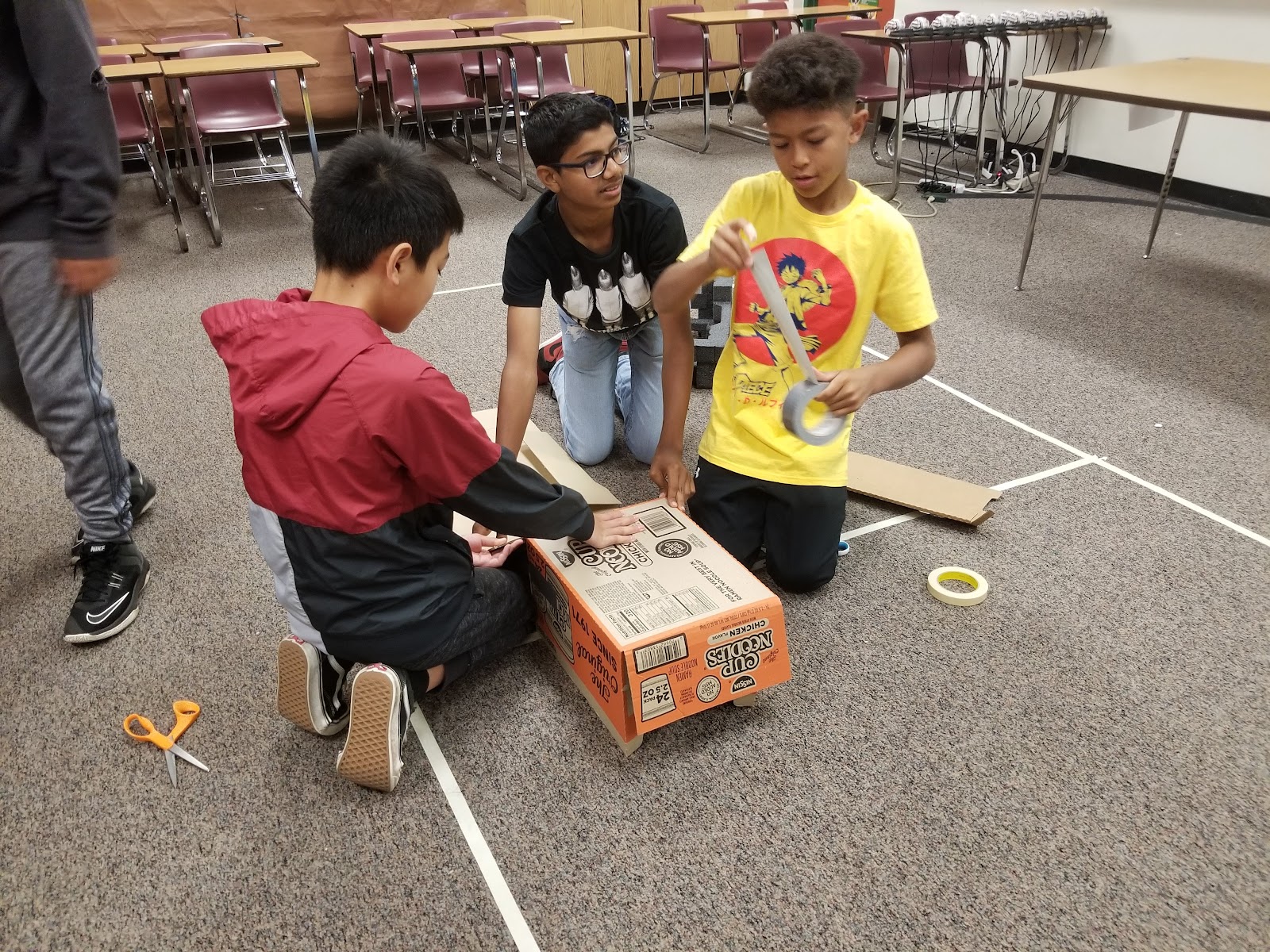
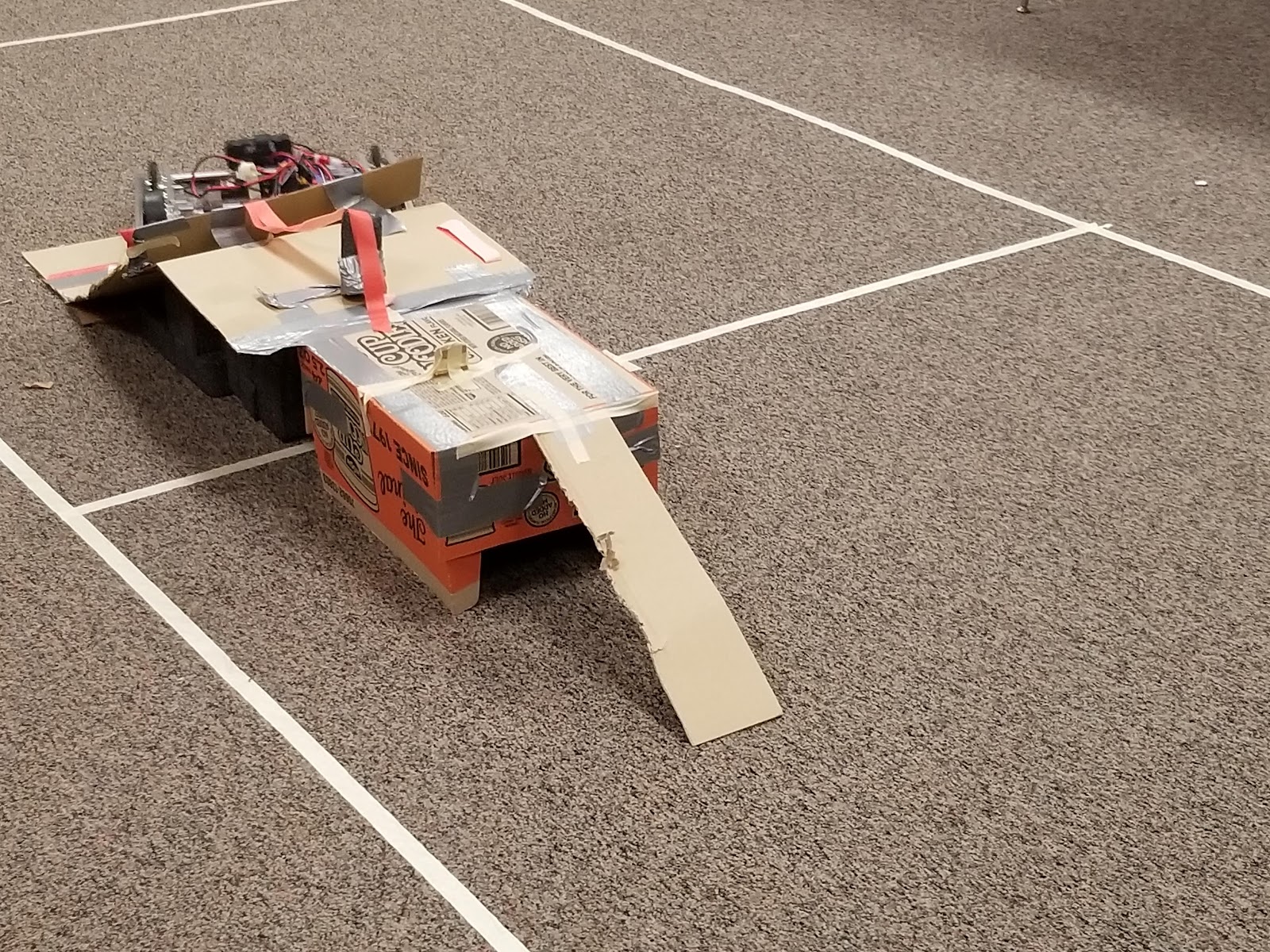
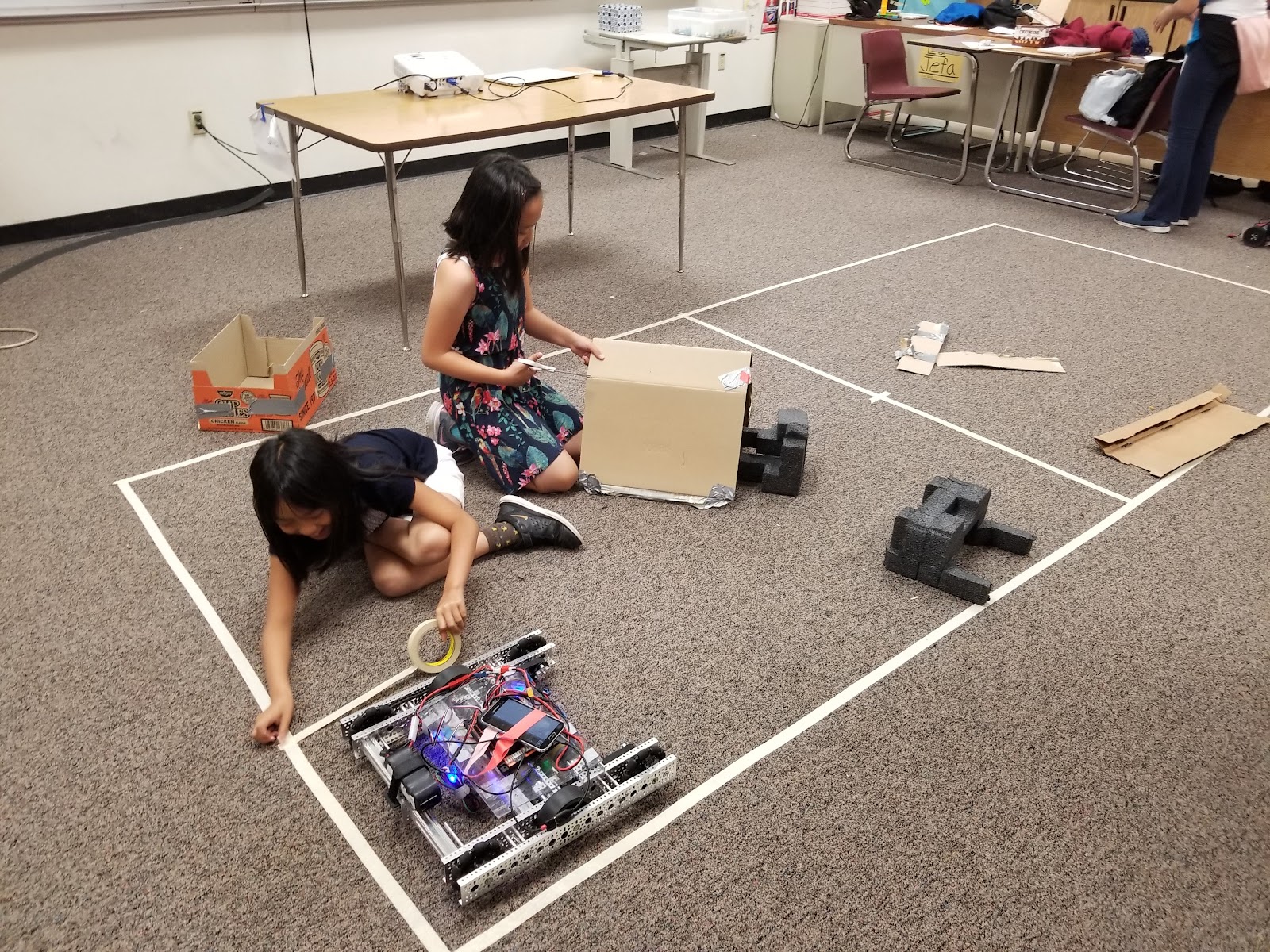
After that, we split the class into two separate groups. One group was to build an obstacle course for the robot out of cardboard, styrofoam, and duct tape we had brought from home and the other was to code an autonomous path to guide the robot through said obstacle course. The programming group got the opportunity to try their hand at Java (they all started with a basic understanding of block code) and the building group was able to be creative (coming up with unique challenges for the other group using only the relatively limited materials we had provided them).
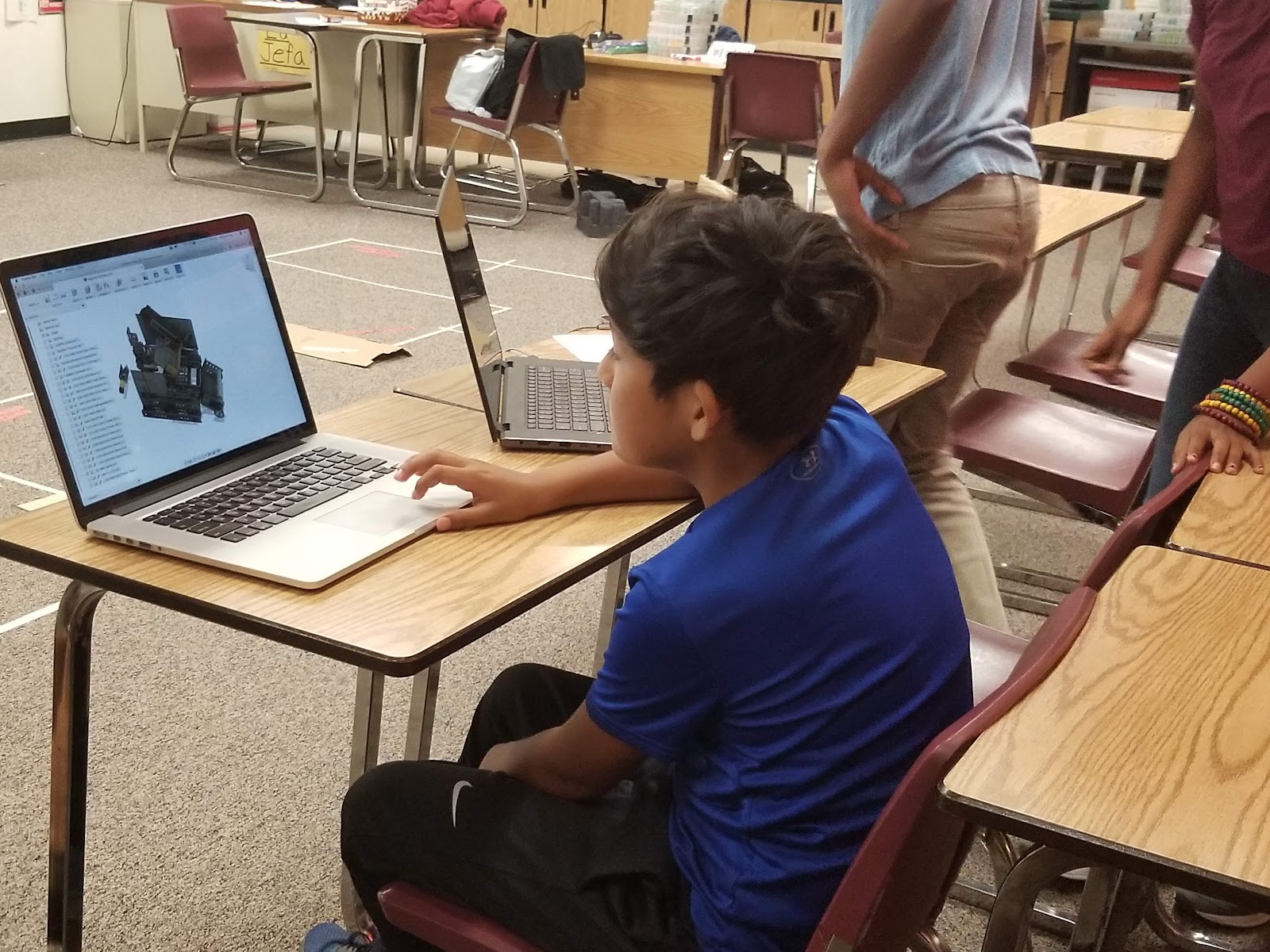
At the same time, for those that neither wanted to code nor wanted to build the obstacle course, we showed some students the CADs we had done last season using Fusion 360. These kids not only got to interact with the kinds of parts we actually use in building our robot, but also gained a deeper understanding of how our robot was designed and why it worked.
The nice thing about this activity was that it gave kids an opportunity to work on whatever most interested them: whether that be mechanical, programming, or design related. Many students were engaged in the activities and asked us questions about robotics beyond the activities, which we were happy to answer in depth. As we only had an hour with each set of kids, this was about all we were able to do, but we are proud of what we were able to teach them.
Impact
The class sizes were pretty small (this was largely due to there being a movie day that coincided with our visit—something that we were unfortunately not informed about earlier). While this meant that we weren’t able to reach as many kids as we had originally hoped to, it also meant that the kids that were there got a more one-on-one experience. Additionally, as there were only a maximum of three of us there at any given time, and given that some of the kids could be a bit loud and unruly, this made things a lot more manageable for us. Overall, it seemed like the kids had fun while also learning a bit about what it’s like to be on an FTC team.
Pictures
Project Pickup

Summary

Website (QR code): evprojectpickup.wordpress.com
Focus: STEM Professionals
People Reached: 15
Man Hours Spent: 53
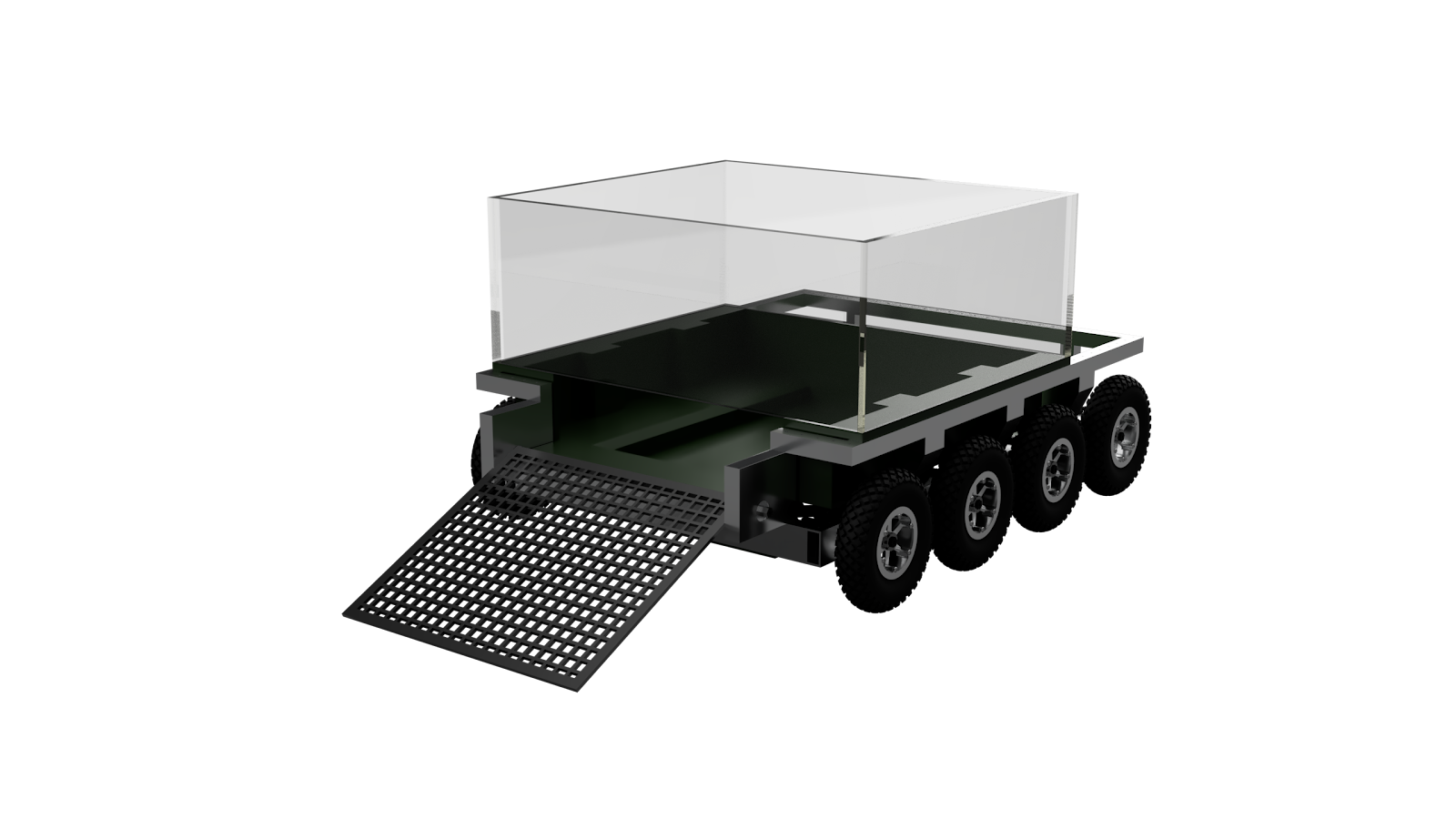
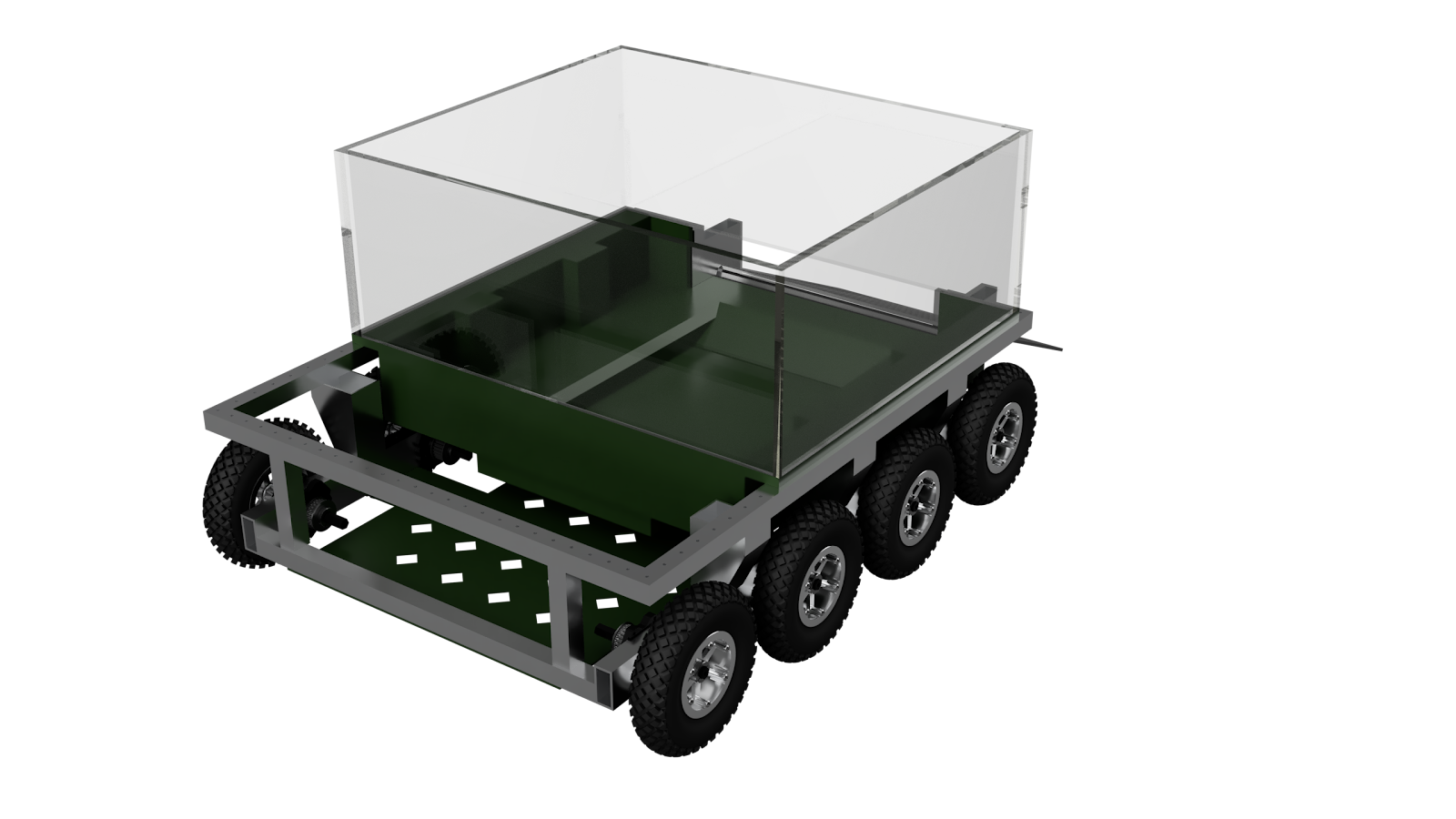
Over the 2019-2020 summer, we partnered with STEM professionals from Applied Materials to tackle the societal issue of the high amounts of trash along our sidewalks. Karthik volunteers with Adopt-A-Highway and realized that we could automate much of the process using our experiences in competition robotics. We realized that an FRC scale robot would be better suited, and collaborated with members from FRC 2854 The Prototypes to design an operator controlled robot that could quickly pick up trash. We completed CAD of a basic prototype robot by the summer, and once our season started, we handed over the project to FRC 2854 The Prototypes.
Impact
To fully understand the unique technical challenges, we volunteered our time with Adopt-A-Highway and helped clean up the highways. We also laid the groundwork for future work on an autonomous highway trash pickup robot.
Project Pickup Meeting 1

Date: 6/8/2019
Time: 9:00 AM - 11:00 AM
Attendance: Nidhir, Justin
Goals |
|
What Was Accomplished |
|
|
|
|
|
|
|
Notes |
|
Reflection |
|
Project Pickup Meeting 2
Date: 6/23/2019
Time: 10:30 - 12:00
Attendance: Sumayya, Nidhir, Trinity, Karthik
Goals |
|
What Was Accomplished |
|
Project Pickup Meeting 3
Date: 6/25/2019
Time: 3:00 - 6:00
Attendance: Nidhir, Justin, Sumayya, Azfar, Rebecca, Ananya, Trinity
Goals |
|
What Was Accomplished |
|
|
|
|
|
Notes |
|
Reflection |
|
Highway Beautification Field Trip
Date: 7/13/2019
Time: 8:00 - 11:00
Attendance: Nidhir, Sumayya, Ananya, Karthik
Goals |
|
What Was Accomplished |
|
|
|
Notes |
|
Reflection |
|
Photos | |||







Project Pickup Meeting 4
Date: 8/31/2019
Time: 11:00 - 1:00
Attendance: Nidhir, Justin, Rebecca, Ananya, Trinity
Goals |
|
What Was Accomplished |
|
|
|
|
|
Notes |
|
Reflection |
|
FIRST Global Stem Corps: Team Samoa

Date
Applied in July
Assigned Early September

Mentoring from September 12-October 27
Summary
Focus: Team Mentoring
People Reached: 15
Man Hours Spent: 4
FIRST Global is a robotics “olympic” that invites over 100 countries around the world to send a team to compete in an annual competition. The goal of the competition is to foster community and global friendship by giving countries that otherwise could not participate in robotics competitions a chance to participate in FIRST Global. Most helped are the countries not reached by other FIRST Competitions. Since FIRST GLobal does not have the manpower to provide each team competing one on one help, they’ve organized FIRST GLobal Stem Corps, where teams and individuals can sign up to mentor one of the FIRST Global Teams. We mentored Team Samoa, who is a first year team in FIRST Global and one of the first robotics teams in Samoa.
Impact
Since it was Team Samoa’s first year competing, they had a lot of technical questions regarding their robot. We provided technical advice, especially regarding drivetrain design, linear slides/hang building, and control theory (regarding the use of encoders and proportional integral derivative control). Thanks to the hard work of their students, Team Samoa would go on to have 7 wins and 2 losses at the FIRST Global competition in Dubai. It was a true honor and privilege helping this under resourced team and we wish them the best of luck in continuing to grow robotics in Samoa.
FGSC Meeting 1
Date: 9/12/2019
Time: 3:00 - 3:30
Attendance: Justin, Trinity, Sia (Team Samoa), Chloe (First Global)
Goals |
|
What Was Accomplished |
|
Notes |
|
Reflection |
|
FGSC Meeting 2
Date: 9/13/2019
Time: 4:00 - 4:30
Attendance: Justin, Sia (Team Samoa), Students of Team Samoa
Goals |
|
What Was Accomplished |
|
Notes |
|
Reflection |
|
FGSC Meeting 3
Date: 9/27/2019
Time: 5:00 - 5:40
Attendance: Justin, Trinity, Nidhir, Sia (Team Samoa), Students of Team Samoa
Goals |
|
What Was Accomplished |
|
Notes |
|
Reflection |
|
Allstars United Partnership
Summary
Focus: Team Mentoring
People Reached: 15
Man Hours Spent: 120
We reached out to Allstars United, a local education company that focuses on providing youth a place for self development. They offered to sponsor us, and in addition, wanted to include us in their new robotics program. They have good ideas on the future of robotics in Evergreen, which we are excited to contribute to. Madan, the CEO of Allstars united, not only supports us monetarily but also by providing rides so that we can mentor his teams and other resources such as 3D Printing. We appreciate the opportunity that Madan has given us, and we are looking forward to continuing to work with him. In the following years, Madan has plans to develop a detailed educational curriculum for classrooms centered around the FIRST Tech Challenge, and we will assist by providing working designs and documenting them.
Impact
At each meeting, we were able to teach absolute beginners how to build their first drivetrain, cascading slides, etc. We also helped them set up Android Studio for their software development.
For this partnership with Allstars United, we focused on having more personal, deeper relationships with the teams we mentored. Because of that, we dedicated ourselves to meeting with the two FTC teams we mentored once a week at Quimby Oak Middle School and Chaboya Middle School, where our own current Omega members graduated from. This allowed us to give back to the community that has given us so much, and foster a passion for excellence in the STEM field in two teams of middle schoolers.
Allstars Meeting 1
Date: 9/22/2019
Location: Path to Excel
Time: 6:00 - 7:20
Attendance: Nidhir, Trinity, Aditya, Vishrut, Amogh
Goals |
|
What Was Accomplished |
|
Notes |
|
Reflection |
|
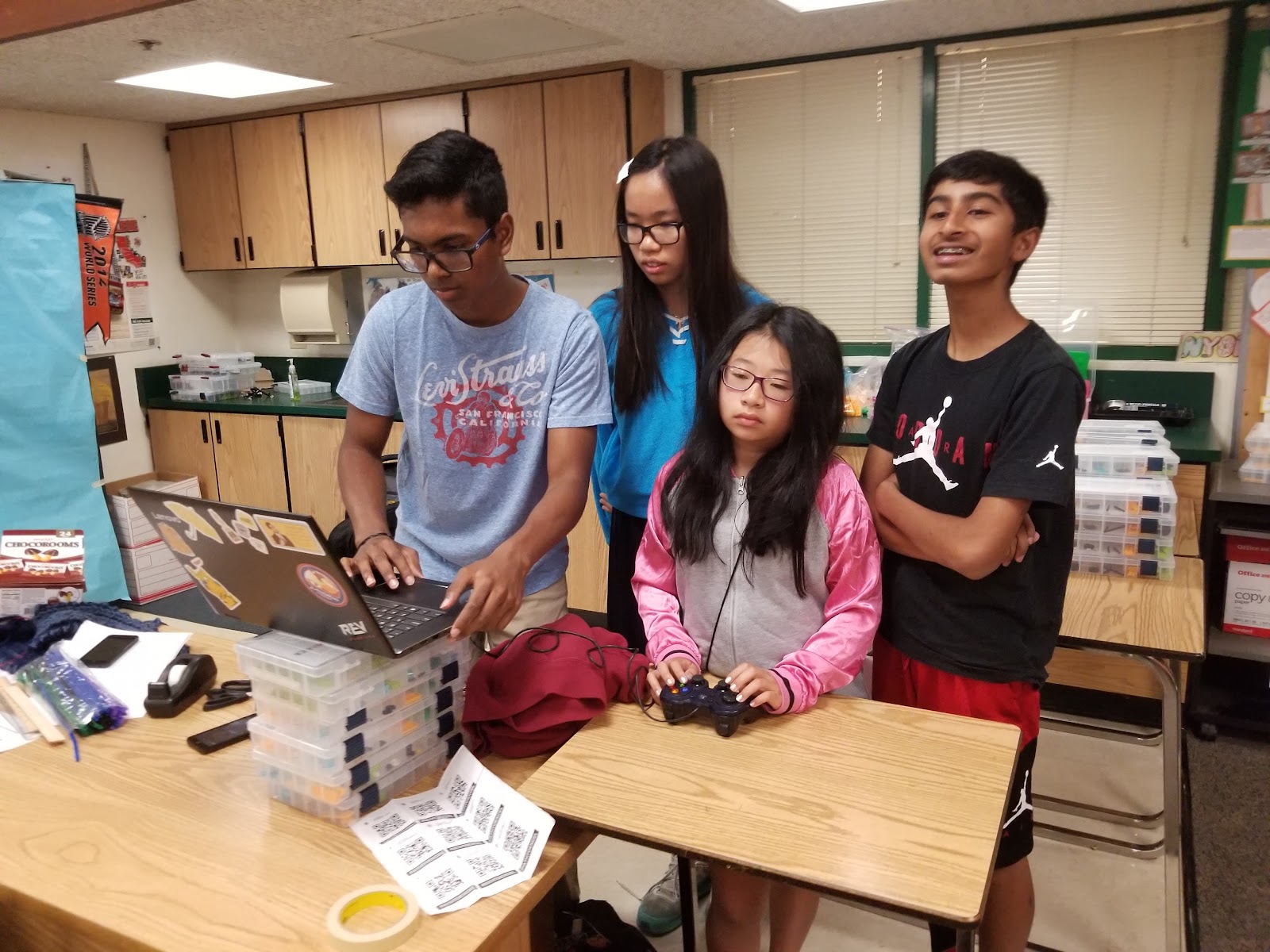
Photos | |
Members of the team showcase our design and renders to Madan. | |

Allstars Meeting 2
Date: 9/29/2019
Location: Path to Excel
Time: 5:00 - 6:30
Attendance: Justin, Trinity
Goals |
|
What Was Accomplished |
|
Allstars Meeting 3
Date: 9/30/2019
Location: Chaboya Middle School
Time: 3:00 - 4:00 pm
Attendance: Nidhir, Trinity, Rebecca
Goals |
|
What Was Accomplished |
|
Notes |
|
Allstars Meeting 4
Date: 10/7/2019
Location: Chaboya Middle School
Time: 3:00 - 4:00
Attendance: Trinity
Goals |
|
What Was Accomplished |
|
Notes |
|
Reflection |
|
Allstars Meeting 5
Date: 10/2/2019
Location: Quimby Middle School
Time: 2:00 - 3:30 pm
Attendance: Nidhir, Trinity
Goals |
|
What Was Accomplished |
|
Allstars Meeting 6
Date: 10/9/2019
Location: Quimby Middle School
Time: 2:00 - 3:30 pm
Attendance: Nidhir, Aditya, Atul, Amogh, Trinity
Goals |
|
What Was Accomplished |
|
Notes |
|
Reflection |
|
Allstars Meeting 7
Date: 10/14/2019
Location: Chaboya Middle School
Time: 4:00 - 5:30 pm
Attendance: Nidhir, Aditya, Amogh
Goals |
|
What Was Accomplished |
|
Notes |
|
Reflection |
|
Allstars Meeting 8
Date: 10/16/2019
Location: Quimby Middle School
Time: 2:00 - 3:00
Attendance: Trinity
Goals |
|
What Was Accomplished |
|
Notes |
|
Reflection |
|
Allstars Meeting 9
Date: 10/21/2019
Location: Chaboya Middle School
Time: 4:00 - 5:30
Attendance: Rohan, Trinity, Aravind
Goals |
|
What Was Accomplished |
|
Notes |
|
Reflection |
|
Allstars Meeting 10
Date: 10/23/2019
Location: Quimby Middle School
Time: 2:00 - 3:30
Attendance: Trinity, Rebecca
Goals |
|
What Was Accomplished |
|
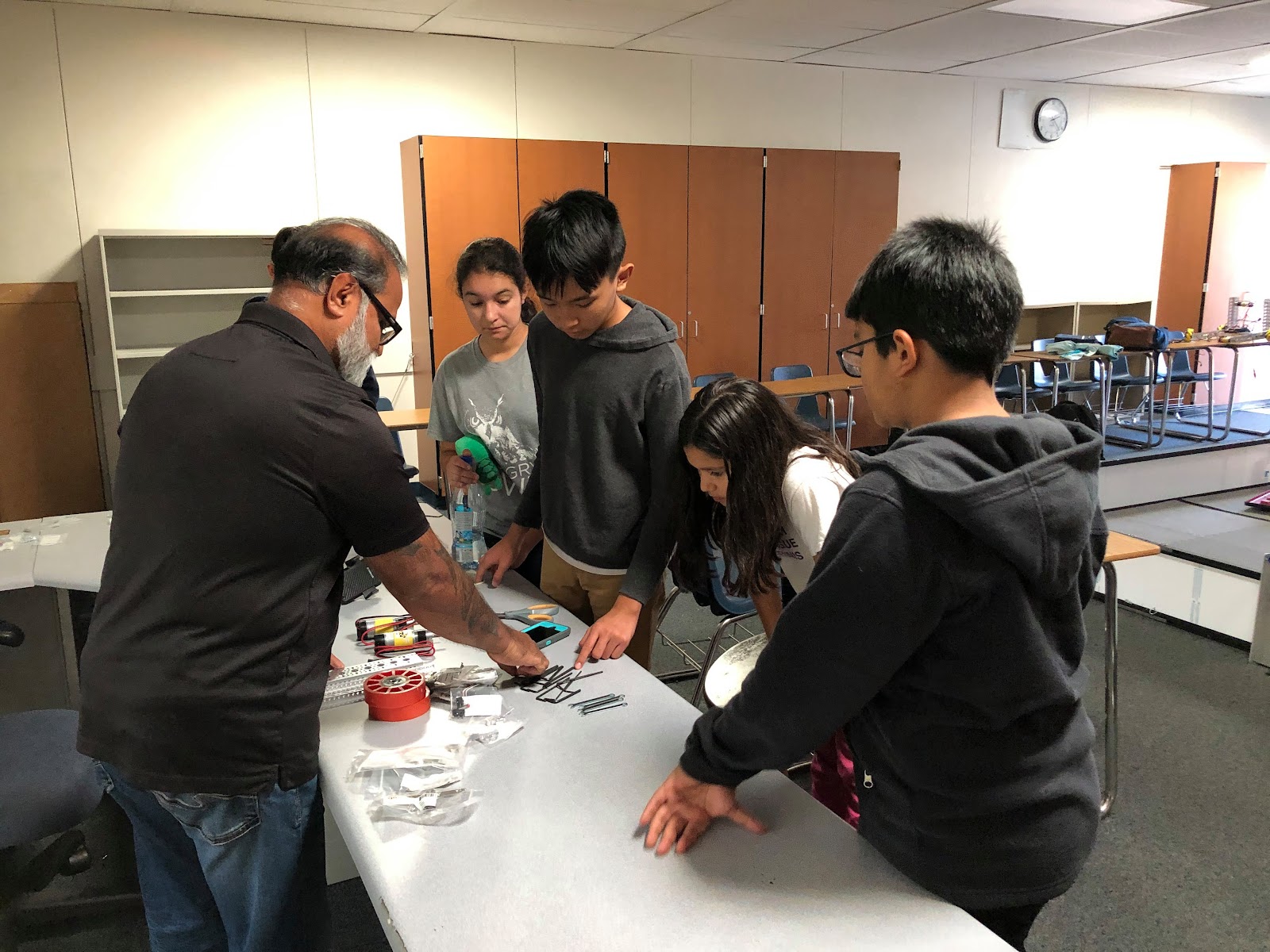
Photos | |
Students on Quimby’s Team work together to assemble goBILDA slides kit for the arm mechanism. | |
Rebecca installs Android Studio on the Allstars team laptops and teaches them basic Java. | |
Quimby’s team works together to get their robot ready to test code. | |
A student assembles the walls of a practice field. | |
Allstars Meeting 11
Date: 10/28/2019
Location: Chaboya Middle School
Time: 3:00 - 5:00
Attendance: Trinity
Goals |
|
What Was Accomplished |
|
Notes |
|
Reflection |
|
Allstars Meeting 12
Date: 10/30/2019
Location: Quimby Oak Middle School
Time: 2:00 - 3:30
Attendance: Aditya, Atul, Nidhir
Goals |
|
What Was Accomplished |
|
Reflection |
|
Photos | |
Guiding the Quimby Allstars team as they build their robot. | |
Allstars Meeting 13
Date: 11/4/2019
Location: Chaboya Middle School
Time: 3:00 - 4:30
Attendance: Trinity
Goals |
|
What Was Accomplished |
|
Notes |
|
Reflection |
|
Allstars Meeting 14
Date: 11/6/2019
Location: Quimby Middle School
Time: 2:00 - 3:30
Attendance: Trinity
Goals |
|
What Was Accomplished |
|
Notes |
|
Reflection |
|
Photos | |
Madan tells the students what they still have left to do on the robot. | The Quimby students gather all the parts they will need to assemble the gripper next meeting. |
Allstars Meeting 15
Date: 11/13/2019
Location: Quimby Middle School
Time: 2:00 - 3:30
Attendance: Trinity
Goals |
|
What Was Accomplished |
|
Notes |
|
Reflection |
|
Photos | |
Some students place the robot on the field so that we can start testing code. | |
A student hides as I try to take a photo of him. (He was assembling the gripper mechanism.) | |

Allstars Meeting 16
Date: 12/4/2019
Location: Quimby Oak Middle School
Time: 2:00 - 4:30
Attendance: Trinity
Goals |
|
What Was Accomplished |
|
Notes |
|
Reflection |
|
Allstars Meeting 17
Date: 1/8/2020
Location: Quimby Oak Middle School
Time: 2:00 - 4:30
Attendance: Trinity, Viva
Goals |
|
What Was Accomplished |
|
Notes |
|
Reflection |
|
Allstars Meeting 18
Date: 1/8/2020
Location: Quimby Oak Middle School
Time: 2:00 - 4:30
Attendance: Josephine, Aravind, Prakash
Goals |
|
What Was Accomplished |
|
Notes |
|
Reflection |
|
Allstars Meeting 19
Date: 1/29/2020
Location: Quimby Oak Middle School
Time: 2:00 - 3:30
Attendance: Trinity
Goals |
|
What Was Accomplished |
|
Notes |
|
Reflection |
|
Allstars Meeting 20
Date: 2/5/2020
Location: Quimby Oak Middle School
Time: 2:00 - 3:30
Attendance: Trinity, Viva
Goals |
|
What Was Accomplished |
|
Notes |
|
Reflection |
|
Allstars Meeting 21
Date: 2/12/2020
Location: Quimby Oak Middle School
Time: 2:00 - 3:30
Attendance: Trinity
Goals |
|
What Was Accomplished |
|
Notes |
|
Reflection |
|
Allstars Meeting 22
Date: 2/26/2020
Location: Quimby Oak Middle School
Time: 2:00 - 4:30
Attendance: Trinity, Justin
Goals |
|
What Was Accomplished |
|
Notes |
|
Reflection |
|
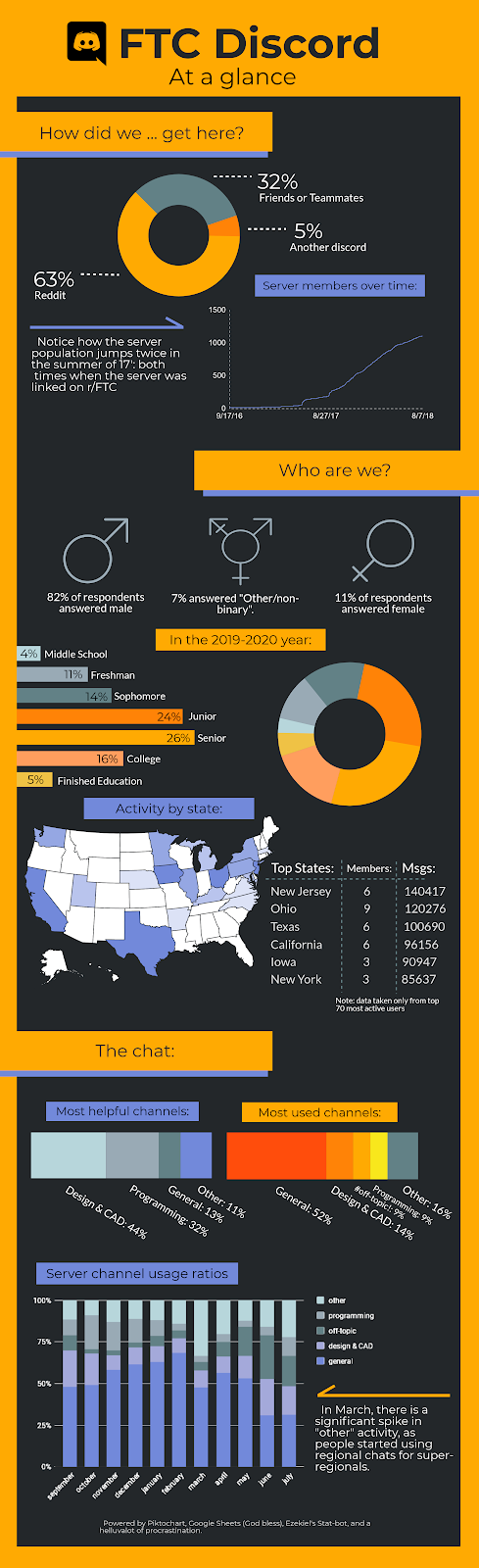
FTC Discord



Summary
Focus: FTC Community
People Reached: Hundreds if not thousands on the FTC Discord (this was not included in Omega’s total people reached)
Ever since 2017 our team has been on various FTC online communities such as the FTC discord. However, since 2018 our team has been increasingly more active. Discord is an online chatting program that facilitates instant messaging/file sharing/voice calling for large communities. The unofficial FTC discord is a multinational community of FTC students, mentors, coaches, FTA (Field Technical Advisors), and vendors to come together and provide help and ideas. The FTC discord has 4,156 members and continues to grow at a rapid pace. It has a mix of both rookie teams and world winning teams that build off each other.
Impact
One of our captains, Justin, is a moderator on the FTC discord, and he helps maintain a welcoming and safe environment on the discord. Additionally, the Swerve Alliance is a smaller discord server made up of mostly veterans, where the idea behind Game Manual 0 (a higher level technical guide to FTC) was developed. Finally, FTC Omega members compete in the VCC (Valor Cad Challenge), a 5 day CAD challenge designed for FTC. Justin also wrote a 3-page rendering guide for the CAD & Design channel.
Game Manual 0

Date
Concept Exploration: April-May 2019
Writing: May-September 2019
Initial Public PDF Release: September 7, 2019

Initial Wiki Release: November 12, 2019
Summary
Website (also see QR code): gm0.copperforge.cc
Focus: FTC Community
People Reached: 6,400 unique website visitors, 10,800 website visits (as of Sep. 7, 2019; this was not included in Omega’s total people reached)
Man Hours Spent: 70-80 hours
One of the major issues facing FTC is the lack of team sustainability and team stagnation. Unfortunately there is a lack of resources to help new/inexperienced teams improve. While there is plenty of documentation for teams to start up a pushbot, there is inadequate information on current FTC design trends on how to build a high scoring robot. As a team, we experienced the faults of this lack of documentation first hand. When we tried to improve after Relic Recovery, we were totally lost with no mentorship guidance or dedicated resources. Many other veterans noticed this pressing need too, and a community effort of 31 contributors on the FTC Swerve Alliance Discord emerged to address this issue.
The great part about having such a wide variety of contributors in a focused, motivated community was the wide breadth of knowledge that was brought to the table. Wide backgrounds like electrical engineers, or mechanical leads, or the top coders in FTC were involved, which meant that Game Manual 0 could truly be a one stop shop for teams wanting to learn more. Even in specific categories, let’s say drivetrain design, there’s a wide variety of ways that FTC teams approach designing one, and we wanted to give teams a wide variety of perspectives to build upon. From custom to kit design, we tried to represent all backgrounds and experiences in Game Manual 0. -Justin
Coming from a team that focuses primarily on iterating quickly with kit based parts, I focused on sections that I had experience in. For example, because I’ve had experience working with multiple kits like TETRIX and goBILDA, I helped write the kit section. I wrote major parts of the kit, drivetrain, glossary, mecanum wheel, and power transfer sections. Since I’ve come from a team that has made rapid progress in a short couple years, I focused on including information that I wish I knew when I was starting FTC. As a managing editor, I’ve also reviewed the entirety of Game Manual 0 to ensure quality and consistency. -Justin
Impact
Game Manual 0 is approximately 250 pages and covers nearly all technical aspects of FTC, from design, build, fabrication, code, and electronics. It has reached over 6400 people online and even more through kickoff events and workshops. Our co-captain, Justin, is one of the four managing editors, and we hope that Game Manual 0 is the first step to raising the floor for all FTC teams.
Excerpts From GM0
Justin’s Guide to Rendering
Date
8/24/2019
Summary
Man Hours Spent: 8-10 hours
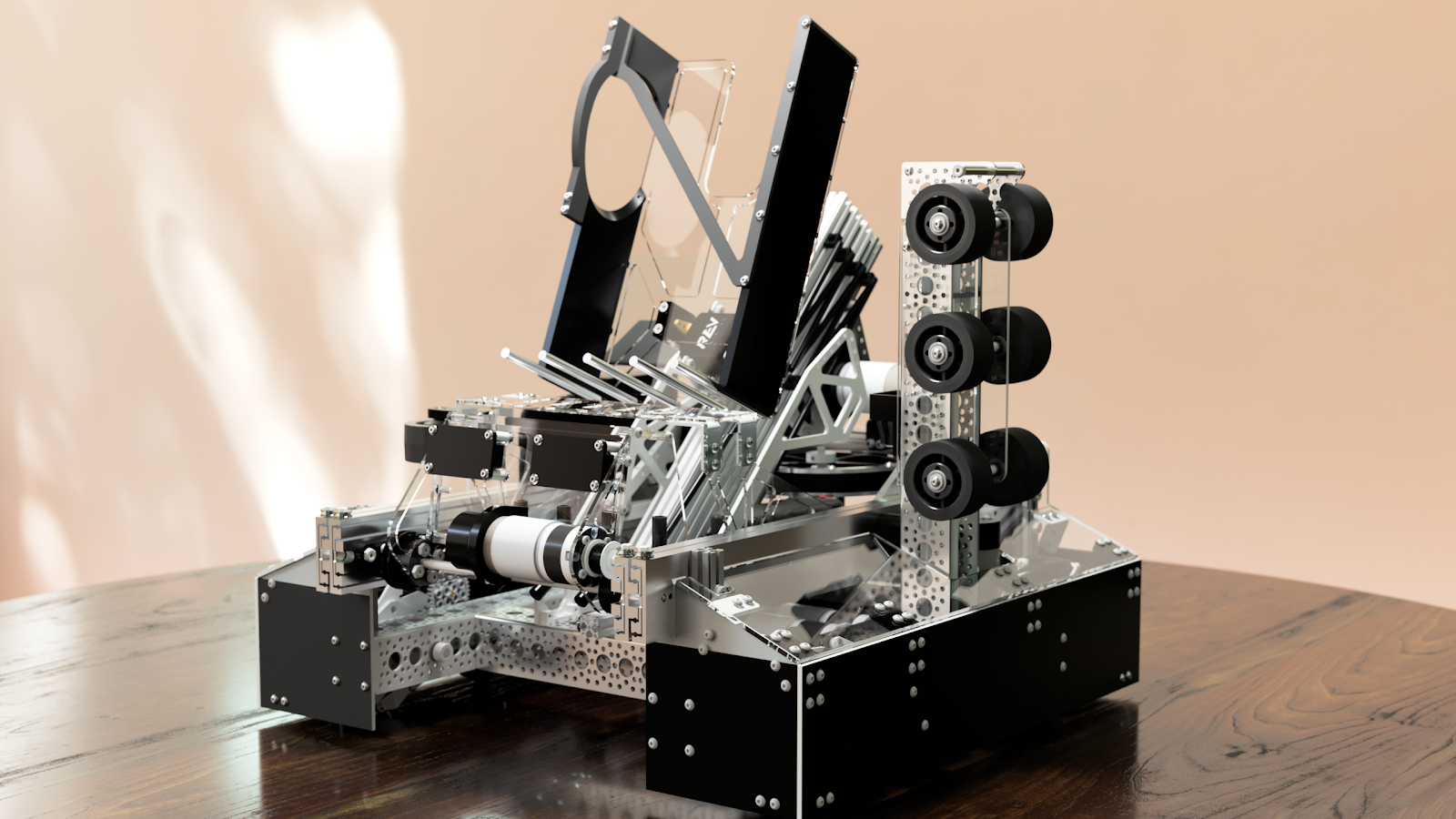
One aspect of the FTC community that wowed me when I was inexperienced was the use of renders. These slick, well put together showcased team’s CADs in a beautiful photo realistic way. Over the summer of 2019, I sought to learn how to render. Very quickly, I became proficient in rendering, with other members of the FTC community taking note of my skills and asking me how to achieve similar results. I wanted to make an easy-to-follow guide so that anyone could achieve comparable renders, and then wrote up such a guide. My guide is a three-page overview on how to get great looking renders quickly in Fusion 360, with tips that can be applied to other rendering programs like SOLIDWORKS Visualize and KeyShot. -Justin
Impact
My guide to rendering was posted on the FTC Subreddit and Discord, with it being pinned in the #design-and-cad channel on the Discord which has 5,520 members as of last count. I also use this guide for sustainability within our team so that the team will be able to produce high quality renders for marketing and documentation purposes for years to come. -Justin

Justin’s Guide To Rendering
8.24.2019
─
Written By: Justin - FTC 9656
Thanks to: Wilson for developing techniques that I use and for the chart and website, Matthew for finding the Aerodynamics HDRI, and Nate, Ethan, and others from the FTC Discord helping me out with renders.
Overview
Rendering is a way to get really cool images out of just CAD images. Through my time rendering, I’ve picked up some tricks to make my renders more realistic. I’ll attempt to document how you can also get similar quality renders very quickly. My instructions will be Fusion 360 centric, however you can probably implement the same concepts in other programs like Visualize, KeyShot, and Blender.
Note that I use a 16k HDRI. I therefore rely on Fusion 360’s cloud rendering, which I found to be fast and be able to handle a 16k HDRI. If you cannot take advantage of cloud rendering, I would recommend using a 4K HDRI.
You can find some of my other renders HERE.
Instructions
- Take a CAD file and assign appearances to components. This is probably the most important part. Appearances affect not just the color of the part, but also how light reflects off of it. How I do it, at least for kit parts, is to take a base part (i.e. a one hole channel) and perfect the appearance of it, then apply that appearance to all lengths of that channel. This includes rendering that single part multiple times until the appearance is perfected. Start by first selecting the appearance that is closest to the real life appearance and then tweak the settings (reflectiveness, color). Go to the bottom of this guide for additional info on appearances.
- Next is to set up your environment. For my renders, there are two parts of this, the parts that exist in CAD and HDRI. I’ll start with the parts that exist in CAD.
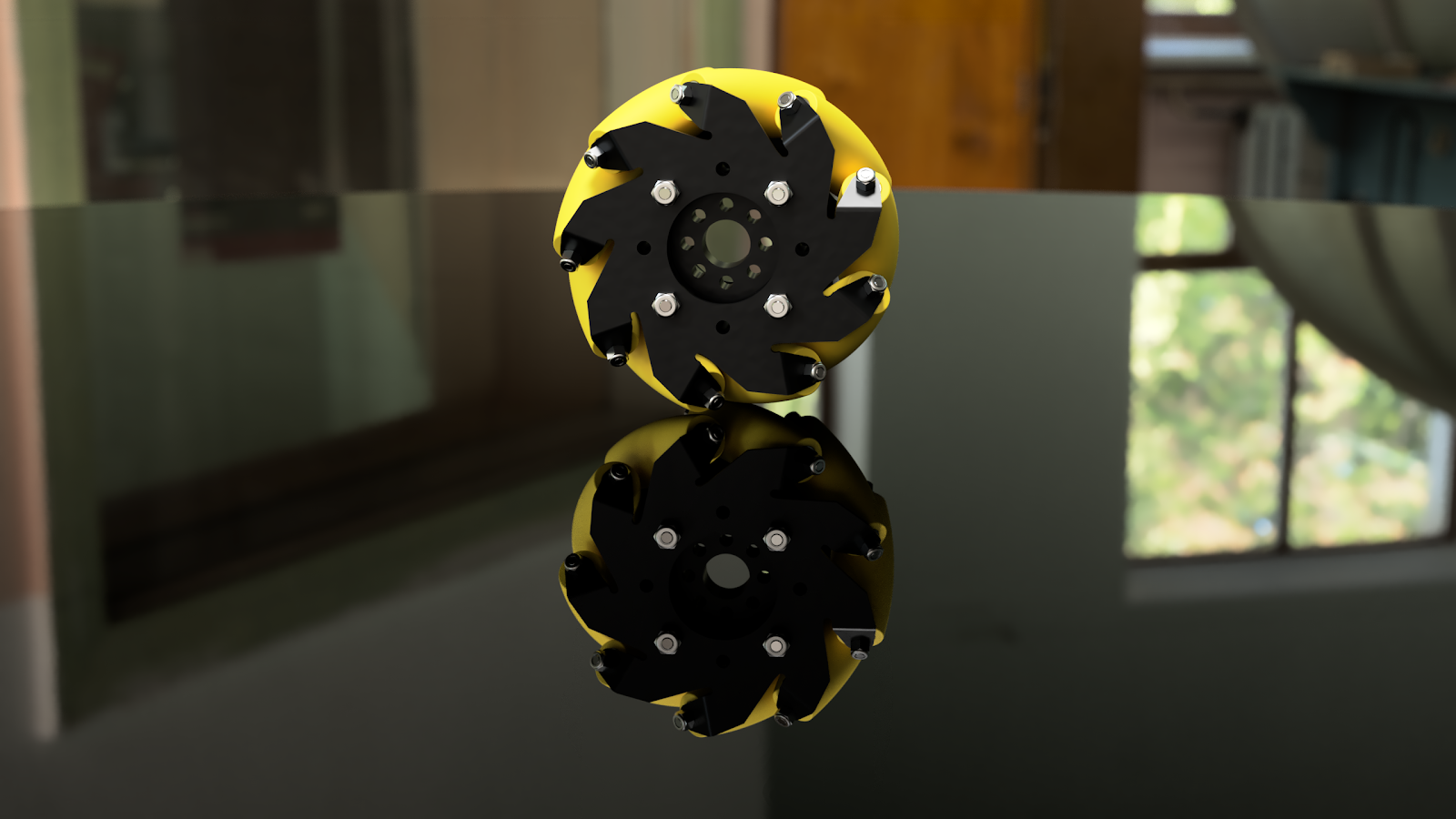
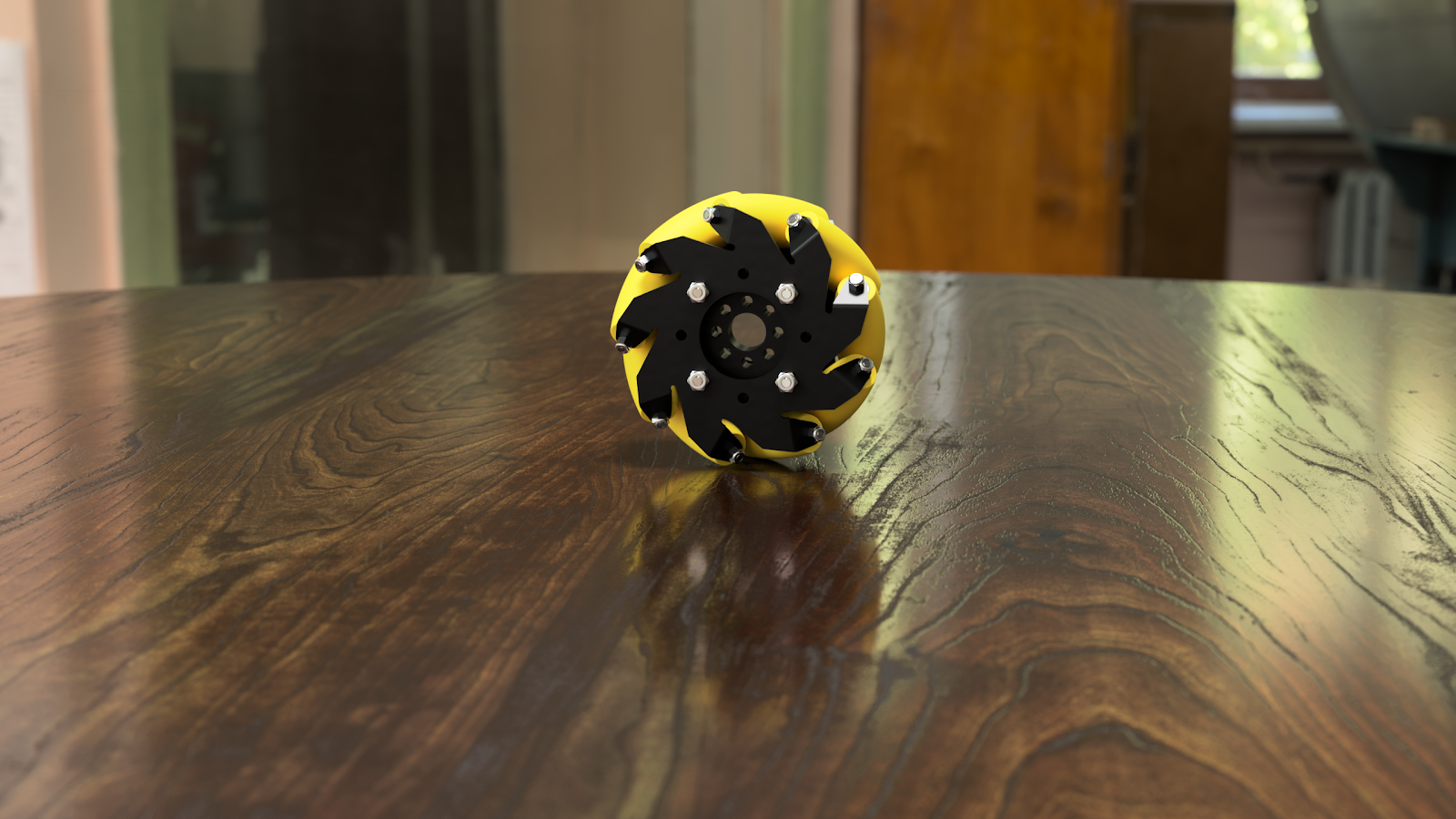
- The Table: By putting your robot or object on a table that exists in CAD, it allows the render to gain a lot more “depth”. For me, it’s just a cylinder with filleted edges, with an appearance applied to it. I’ve found two appearances work really well for tables, walnut-gloss (in fusion 360) and a tempered glass stand in. I’ve also seen other people use marble to great effect.
- Custom Lighting: By creating your own lighting points, you can adjust the lighting in your renders to highlight certain parts of your design or just seem a bit more realistic. Fusion 360 does not support adding light points, so a work around is to cad any geometric object, and then assign a illuminative appearance to it. I use a cube and use the appearance “LED SMD 3528 - 8M”. You can adjust the shape of your “light” and it’s brightness and color to get different effects.
- HDRI (High Dynamic Range Imaging): Think of a HDRI as a 360° image that also contains lighting data. Your rendering program takes this lighting data and uses it to light the scene. This allows for incredibly realistic lighting and reflections (think light streaming in from windows, etc). Additionally some HDRIs include a background image, which can help add more realism to your render. I personally use the Aerodynamics Workshop HDRI from HDRI Haven. Note that using a HDRI will significantly increase render times, so make sure to either have a powerful computer or use the cloud.
- Final touches: You’ve got your scene set up, so now it’s time to actually render it. First, make sure to frame your scene. This comes with practice, and those with photography experience will have an advantage. Additionally, no matter how high resolution a HDRI might be, the background will never be sharp enough to mimic real life by itself. Therefore, I usually integrate a light blur (sometimes called depth of field) in all my images. Time spent rendering and other specific settings are usually found out through trial and error.

Appearances Table:
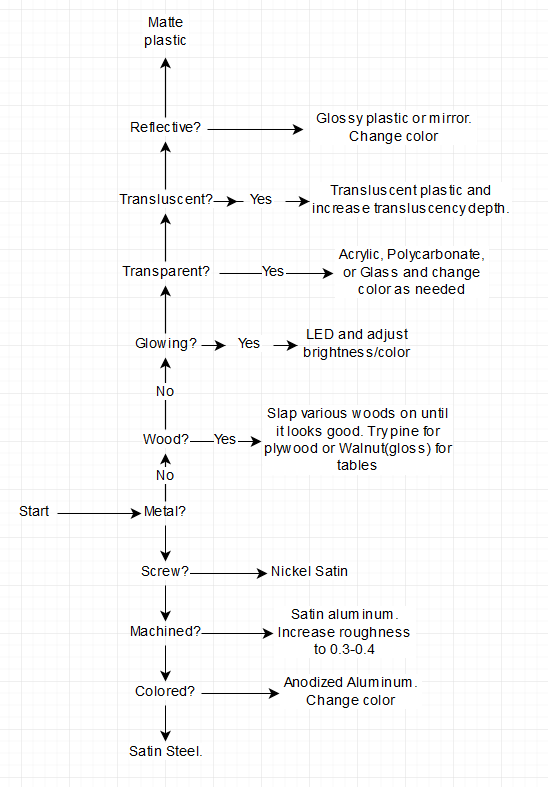
This table (right) was made by Wilson from FTC 3791/14417 and is a great way to help assign appearances.
Final Note
If you’ve got any questions, feel free to reach out to me on the FTC Discord (my handle is Justin | 9656). If this guide has been helpful to you, I would appreciate a shoutout, and have fun rendering!
Awards
Inspire Award, 1st & 2nd Runner Up

We got 1st Runner Up for Inspire at the San Jose Micron Qualifier. We got this for our Outreach with our local middle schools.
Omega won 2nd Runner Up for the Inspire Award by being nominated for 3 other awards, embodying the spirit of the FIRST Tech Challenge, and gracious professionalism.
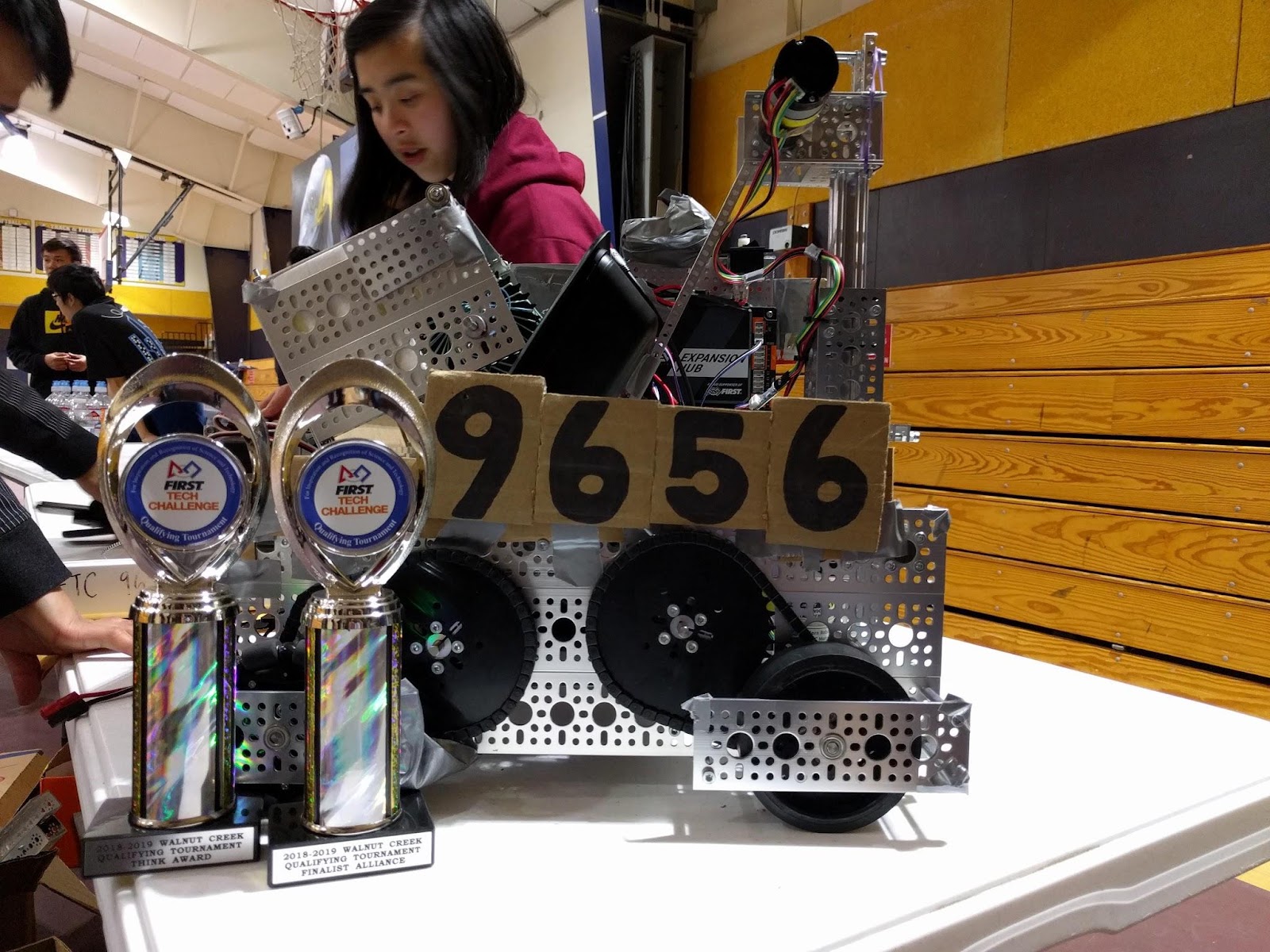
We got the nomination of 1st runner up at the Walnut Creek Qualifier, 2019. This was mainly because of the impressiveness of the sheer number of other nominations and awards we won.

Finalist Alliance Captain
We made it to the finals with the help of FTC 16026 AlphaBots at the Micron Qualifier (San Jose)!
At the San Mateo Qualifier at Nueva High School during the Skystone season, we allied with 15037 UwU Robotics. Our alliance partner was a good choice as their delivering mechanism worked well with our robot.
We made it to finals allied with FTC 14473 Future! Our alliance partner proved to be very helpful and friendly, so that was nice. This was at the Walnut Creek Qualifier of 2019 and the first time we made it this far.
Rockwell Collins/Collins Aerospace Innovate Award

Our team was able to win the Innovate Award in both 2016 at the Github Qualifier and 2019 at the Cisco Qualifier.
In 2016, our team built a functioning robot with only $20 and an empty yogurt cup.
During the Rover Ruckus 2018-2019 season, our team was able to do a nearly complete rebuild of our robot in 3 under weeks, featuring a reliable lift mechanism, drivetrain, drawer slide horizontal extension, and intake. All of these elements combined to make an efficient robot at the Cisco Qualifier.
We got the Innovate 1st Runner Up at the 2020 Micron Qualifier in San Jose for our efficient intake mechanism.
Think Award
During the 2019-2020 Skystone season, Omega won the Think Award at the Burlingame Qualifier for our detailed engineering notebook, which demonstrated our careful planning and robot design.
We won the Think award at the Walnut Creek Qualifier in 2019 for our exceptional diagrams and documentation of autonomous paths, our CAD designs, and our math derived turn-angles as well as the specification of each PID role.
Connect Award, Winner & 2nd Runner Up

We won the Connect Award at the Micron Qualifier in San Jose. We got this for our Outreach guiding a robotics team in Samoa through First Global Stem Corps.
We got this nomination at the Walnut Creek Qualifier, 2019. This was for our collaboration with the HOMAR creator teams (FTC Teams 11117 and 12660) located in Maryland. We had found a problem with the physics behind their rotational code and worked with them to fix it.
Control Award, 1st Runner Up
Our team was also able to win the Control Award, 1st Runner Up at the 2019 Cisco Qualifier for our fully functional PID code, which allowed our robot to move and turn with increased precision during autonomous. The judges described our PID as a “finely tuned Swiss watch”!
We also won the nomination of 1st runner up at the Walnut Creek Qualifier 2019 because of our PID, once again, but also due to our extremely reliable autonomous at the qualifier.
Business Plan
Overview/History
FTC 9656 Omega has existed since 2014, but the team had generally stagnated at a very low competitive level until the 2018-2019 Rover Ruckus season where we made large advances both in awards and robot performance, making it to the Northern California Regional championships for the first time ever in our team’s history. We learnt a lot of lessons the hard way throughout the season, but an important part of our plan is to have continuous improvement over the course of the next few years.
Another cornerstone of FTC 9656 is our 100% student run nature. Throughout our history we've had very little mentor support, with our mentors simply signing us into competition. Therefore, we have to build our team around student leadership. For example, students build, design, and code the robot. Additionally they organize fundraising and outreach. We also manage sponsor relations and team organization. We need to focus more on building a sustainable framework for growth, since we don't have a coach to tie our team together and assist with sustainability.
Mission
FTC 9656 Omega seeks to give everyone, no matter their background or interests, the opportunity to compete at a high level in robotics. Whether interested in art, graphical design, marketing, business, software, mechanical design, or custom fabrication, everyone has a spot on our team. This dedication comes from our current team makeup; we have an eclectic mix: from parliamentary debaters to competitive ice skaters. Further, our team is 100% student-run with virtually no adult intervention.
We seek to continually improve over the next several years in robot design and performance, connecting with our community and providing more opportunities, and ensuring the continuation of the team by establishing consistent sources of income. To continually improve, we must also seek strong skills sustainability.
Robot Performance
We seek to build robots that perform at higher and higher competitive levels each year. This means that we need to work on adopting and sticking to good design practices. This means increasing the amount of prototyping and iteration and the amount and quality of CAD. This also means improving our robot code every season by using community libraries like Roadrunner, FTC Dashboard, and speedyDoge and retaining the code knowledge through tutorial videos and online instructions.
Community Outreach
At FTC 9656, we believe that our unique perspective as a robotics team that has greatly improved over the span of one season lends us a unique perspective that we can put to work doing focused outreach. What does focused outreach mean? It means that instead of doing many small outreach events, we try to focus on a few specific outreach efforts where we believe our work can make the most impact.
For example, we decided to tackle societal/environmental problems like litter along our freeways by creating Project Pickup, using our robotics knowledge to help improve the quality of life of trash pickup volunteers. Additionally, since we know how difficult it can be for inexperienced teams to gain the knowledge to improve, we worked with other members of the FTC Swerve Alliance to create Game Manual Zero, a 200+ page comprehensive FTC technical guide. We also wanted to give back to the community in other ways, which is why we signed up to help FIRST Global teams through Global Stem Corps.
To complement this focused outreach, we also do general community outreach, whether it be presenting FIRST and FTC to middle school students or teaching 6th-8th graders robotics. We aim to continue expanding our horizons, particularly in business outreach. We hope to work with local businesses to become more active in our local STEM community, and plan to host a multi-day FTC/FLL camp next year.
Fundraising
In previous years, FTC Omega relied entirely on member donations to operate. Recently, however, we’ve begun to branch out to find alternative methods. For example, during the 2018-2019 Rover Ruckus season, we held a fundraiser at YogurtLand, and applied for multiple grants.
In the 2019-2020 SKYSTONE season, Omega is actively pursuing other forms of sponsorship, from partnering with STREAM education (a 501(c)3 nonprofit) to applying for sponsorships with local tech companies and other FTC associated companies like goBILDA and REV Robotics.
In the next few years, we hope to continue shifting away from relying on member donations by building concrete and long term relationships with our sponsors. To help accomplish this, we have created a list of marketing standards (Marketing pg. 90), a sponsorship packet (see Sponsorship Packet in the Appendix on pg. 114), and a website to help market our team to sponsors. Please see the Finance section (pg. 83) for more information.
Strategic Plan
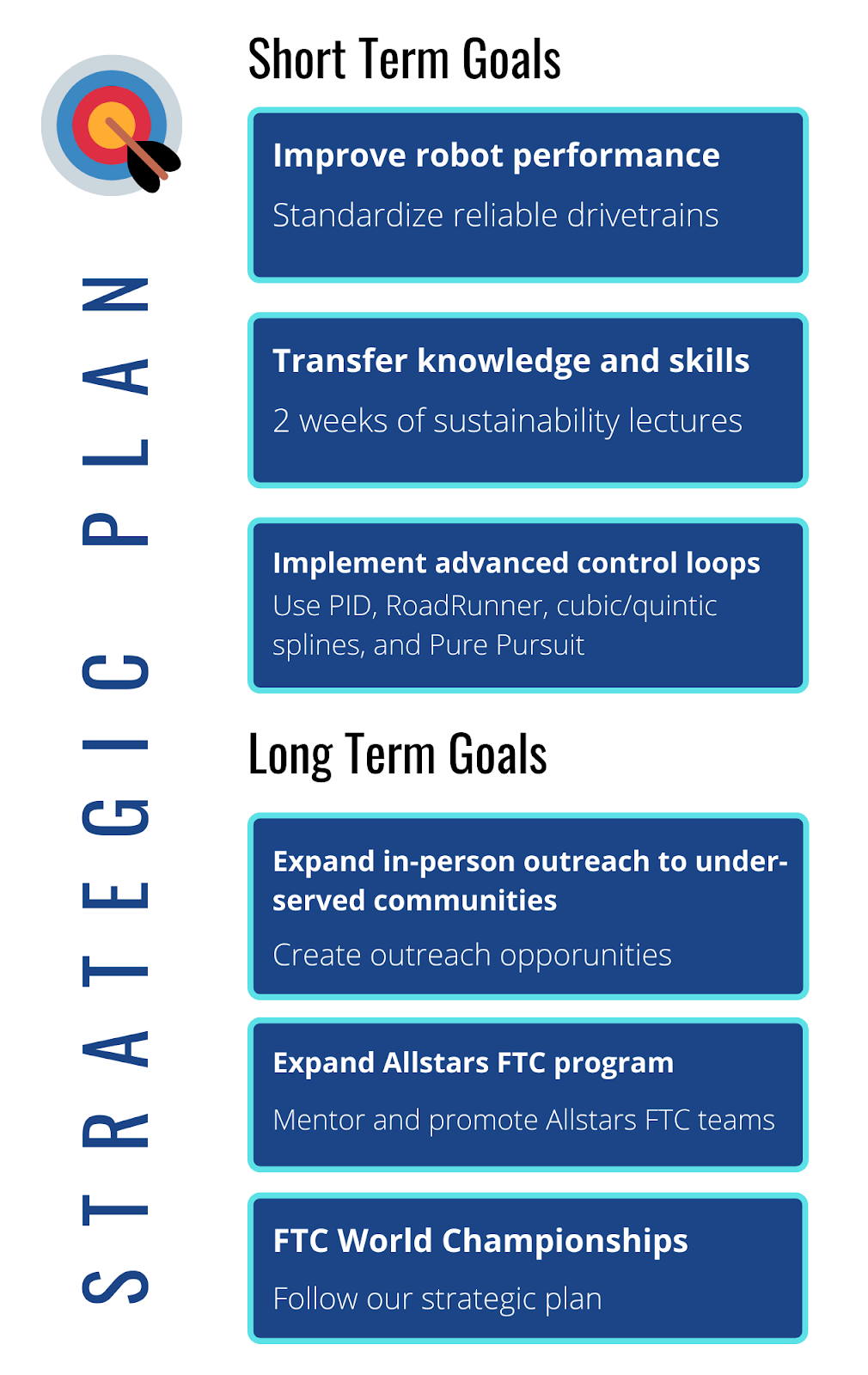
Sustainability
Overview
Sustainability can be broadly split into two aspects: team sustainability and skills sustainability.
Team Sustainability
Team sustainability is defined as the ability of the team to exist in the upcoming years. This includes member recruiting and financial stability. Since we are associated with a school, this allows us to bring in a steady supply of new members, guaranteeing constant membership. Our team is built around little mentorship support, meaning that even if we have a lack of mentors for one year, our team can continue competing through our Leadership/Management sustainability. Additionally, we are working on ensuring financial stability by improving the amount of fundraising we do in the community.

We also recently signed up for Trello (logo right), a productivity tool we use to organize our team by having virtual boards where we post tasks for each subgroup (Mechanical, Programming, etc.). Credits to Aditya Mogli for finding this website for the team. We started using this application because we were having trouble in making sure that everyone knew what needed to be done and by when. With this app, we are able to assign tasks to certain members as well as view objectives that need to be done. So far, it has greatly increased our productivity, allowing members to jump right into work when meetings start instead of spending time delegating tasks. It also helps with communication between subteams so that everyone can access information about what is being done at the moment and what has been finished.
Skills Sustainability
Skills sustainability is defined as the ability to keep certain skills inside the team, even as team members graduate/leave. This is an important part of our goal of continual improvement, so that we never have to start from scratch and reinvent the wheel. Our specific sustainability plans are outlined below.
Mechanical
- All members of the team are expected to have a basic understanding of mechanical, whether it be putting parts together or what certain parts do on the robot.
- We will try to introduce mechanical concepts to new members through GM0 and by teaching as experienced members continue to build parts.
- Additionally, we will try to have inexperienced members build prototypes early in the season, so they gain valuable hands on experience.
Programming
- Our team uses GitHub (we previously used GitLab for private repositories, but now they are supported by GitHub) for version control, meaning that anyone can quickly access our code and it can easily be built upon year by year.
- We have a specific procedure to quickly allow anyone to set up a code development environment base quickly, no matter their technical background.
- Throughout the season, more experienced programmers will try to teach newer programmers.
- Omega uses many community driven code libraries like Roadrunner, FTC Dashboard, and DogeCV, which allows us to focus more on implementing features onto our robot instead of starting from scratch on each feature.
Design
- Omega has a robust and well organized CAD library inside Fusion 360, which means that anyone can start to CAD without spending time setting up the parts/appearances necessary.
- We are planning to have prospective designers complete Modules 1-4 on the Fusion 360 for FIRST Robotics Competitions online course, which gives prospective designers the basic tools to CAD complete robots.
- New designers will begin by putting basic kit components together in CAD using joints, and slowly move into more advanced custom designs. By slowly increasing the difficulty of the tasks we can build skilled designers that understand both have the technical ability to CAD and the creativity/problem solving ability to go from idea to design.
- Additionally, to retain rendering and CAD visualization skill, we have written a guide detailing how we accomplish our near photorealistic renders and have made it publically available for anyone to access.
Finance
- To help the team start off on a strong footing in fundraising, we assembled templates for our treasury, binder, sponsorship packet, and email script so that the team will always have all the tools necessary to raise funds.
- We hope to create lasting relationships with our sponsors/benefactors by providing concrete benefits to our community and our sponsors.
- I.E. providing technical support to the Allstars United Program
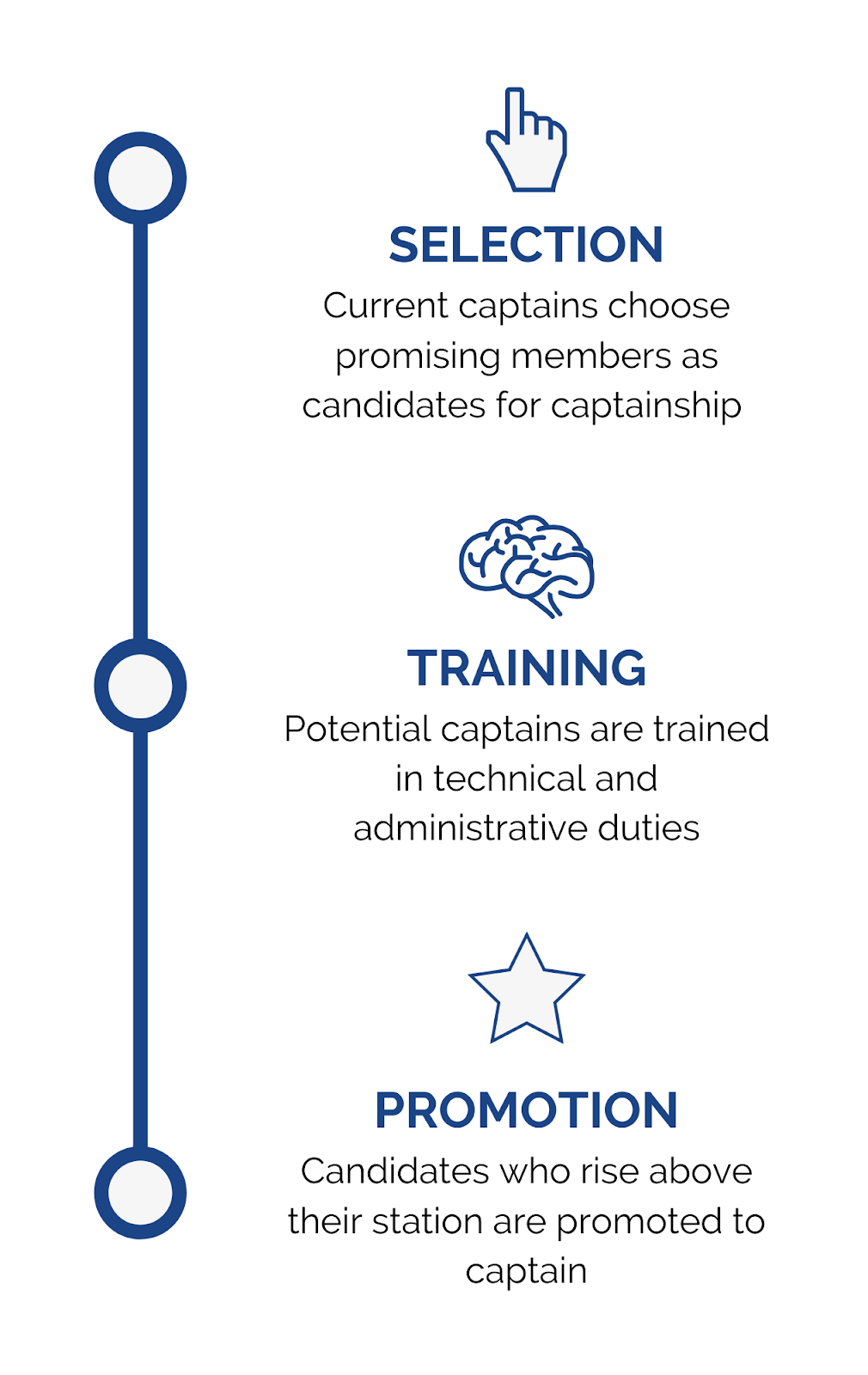
Leadership/Management
- FTC Omega operates on a 2 captain structure, where there are 2 co-captains at all times. They have equal power, and this structure is meant to reduce the strain/stress on each captain and ensure even if one captain is busy with other commitments, the team can still effectively function.
- Furthermore, captains will be trained up during their junior year, and then take full responsibility in senior year. This effectively creates a self-fulfilling cycle, where prospective captains are trained up early junior year, then gradually get more experience later along junior year, before taking the official “captain” role their senior year, training up the next generation in their senior year.
- This means that at any one time, at least two people will have the knowledge to be effective captains, with up to 4 trained up captains nearing the end of the season.
- We have created an extensive team protocols document (found on the following pages) that details the management, organization, and other important parts of our team. By formalizing these aspects, we can ensure team sustainability.
Finance
Treasury
We record all of our financial transactions on our Omega Treasury spreadsheet. This master spreadsheet includes:
- Summary sheet with our current balance, total income, total expenses, average income, and average expense
- Income sheet with an overview of sponsor and member donations
- Expenses sheet with an overview of our purchases and other expenses
- Bill of Materials (BoMs) sheets that detail each of our purchases and individual items and their costs
- STREAM (Linked) sheet to automatically link our financial records with our non-profit, STREAM Education Foundation (see Sponsors)
Income
In previous years, our team has relied almost solely on team member donations. This year, we made the switch to relying mostly on monetary donations from sponsors supplemented by member donations. The table below is a summary of our income.
Name | Organization | Amount Donated | Actual Income | Status | Contribution Level | |
1 | Madan Bellam | Allstars United | $1,000.00 | $930.00 | Pending | Platinum |
2 | Brittani Wyrick | Freeman Orthodontics | $200.00 | $186.00 | Pending | Silver |
3 | Josephine Luong | Omega | $250.00 | $250.00 | Reimbursed to Omega | Donated $250+ |
4 | Afra Muhammed | Omega | $100.00 | $100.00 | Pending | Donated <$250 |
5 | Ananya Devanath | Omega | $20.00 | $20.00 | Reimbursed to Omega | Donated <$250 |
6 | 2nd Robot + Ri30H Upgrades | Allstars United | $1,388.61 | $1,388.61 | Reimbursed to Omega | Platinum |
7 | Intuitive Surgical | Intuitive Surgical | $500.00 | $465.00 | Pending | Gold |
Sponsors
Our sponsors are very important to us as they help make Omega possible. We would like to thank STREAM Education Foundation, Allstars United, the Intuitive Foundation, and Freeman Orthodontics for generously providing most of our financial aid.



STREAM Education Foundation (Stella Seo) - A 501(c)(3) nonprofit and platinum sponsor which allows donations from other organizations to be tax-deductible.
Allstars United Education Foundation - Another one of our platinum sponsors who provided us with monetary support and outreach opportunities.
Intuitive Foundation - A gold level sponsor that provides grants to FIRST teams every year. After our application, they provided us with $500 through the FIRST storefront, and we appreciate their financial support.
Freeman Orthodontics - A silver sponsor that generously donated to our team.
To attract potential sponsors, we created a sponsorship packet (bit.ly/sponsoromega) detailing information about FIRST, our team, FTC, and possible ways for organizations or businesses to provide us with much needed support. An infographic summary of possible ways to sponsor our team is below.
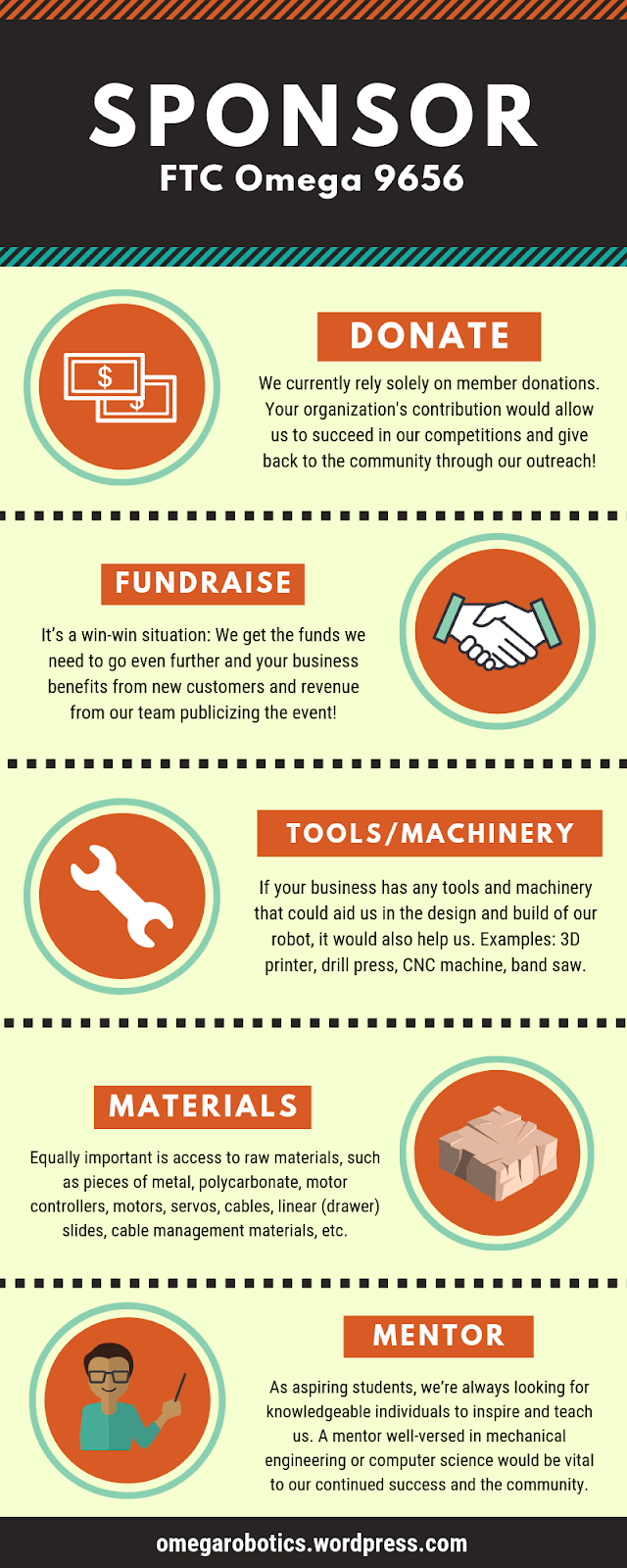
We also provide a breakdown of incentives provided to sponsors depending on the amount of support we receive from them, which is shown below.
Sponsorship Benefit | Bronze ($25-199) | Silver ($200-499) | Gold ($500-999) | Platinum ($1,000+) |
Letter of Appreciation | ⬤ | ⬤ | ⬤ | ⬤ |
Mention in our Competition Documentation | ⬤ | ⬤ | ⬤ | ⬤ |
Mention on Website of Level of Sponsorship | ⬤ | ⬤ | ⬤ | |
Facebook Shout-Out | ⬤ | ⬤ | ⬤ | |
Omega Robotics Merchandise | ⬤ | ⬤ | ||
Sponsor’s Logo on Robot | ⬤ | ⬤ | ||
Sponsor’s Logo on Omega Merchandise | ⬤ | |||
Organization Description and Linked on Website | ⬤ |
Expenses
This year, Omega has meticulously documented all of our expenses. Most of our expenses come from purchasing parts for our robot, but it can also come from competition registration and miscellaneous other expenses.
Using our custom Bill of Materials template, we were able to record exactly which parts and how many parts we need to order, as well as their vendors and costs. It also allowed us to save time and money by having our expenses all in one place and using spreadsheet formulas in order to project costs and determine how many parts we need rather than doing guesswork.
Description | Vendor / Organization | Total Cost | Purchased By | Paid Using | Date | |
1 | Partial Field Set + Alliance Markers | AndyMark | $414.39 | Nidhir Guggilla | Personal funds | 9/4/19 |
2 | Andymark Compliant Wheels | AndyMark | $43.70 | Nidhir Guggilla | Personal funds | 9/12/19 |
3 | 1st goBILDA Purchase | goBILDA | $221.17 | Nidhir Guggilla | Personal funds | 9/13/19 |
4 | 2nd goBILDA Purchase | goBILDA | $245.20 | Nidhir Guggilla | Personal funds | 9/23/19 |
5 | FIRST Registration | Pitsco | $275.00 | Nidhir Guggilla | Personal funds | 10/31/19 |
6 | Long Robotics Slides | Long Robotics | $162.62 | Nidhir Guggilla | Personal funds | 10/8/19 |
7 | Presentation Board | CVS Pharmacy | $20.00 | Ananya Devanath | Omega team funds | 11/6/19 |
8 | 3rd goBILDA Purchase | goBILDA | $13.74 | Nidhir Guggilla | Personal funds | 11/8/19 |
Summary
Current Balance | $338.20 |
Total Income | $3,339.61 |
Total Expenses | $3,001.41 |
Average Income | $494.09 |
Average Expense | $239.89 |


Marketing
Consistent Branding
In order to maintain consistency in terms of branding (particularly for our engineering notebook), we created an engineering notebook template and instructions (below).
MISC. INSTRUCTIONS ON HOW TO USE THIS TEMPLATE
Space-Filling Boxes
Per FTC Engineering Notebook guidelines as of the 2018-2019 season, if your binder’s pages have any significant blank space, you must use some sort of box in order to denote that the space is blank. The box above can be copied and pasted for that purpose. Resize it as you see fit. However, do not overuse boxes—you should always try to either fit content onto the previous page using formatting or add more quality content to finish the current page. Also, do not stretch the box too much. It’s better to have 2 medium-sized boxes than to have an extremely distorted large box.
Colors
- Black (primary text color) #000000
- White (probably won’t be used in the binder because white paper) #ffffff
- Navy (accent color) #1c4587
- Light blue 1 (accent color for tables) #6d9eeb
- Light blue 2 (highlight color) #a4c2f4
- Gray (other) #666666
Fonts
- Oswald (header)
- Raleway (header)
- Oxygen (body)
- Unica one (footer/page number)
Referring to Other Brands
Refer to other brands as listed in their branding standards. This is especially important when referring to sponsors. Here are some examples of some common robotics brands and how to refer to them:
- goBILDA
- AndyMark (can be shortened to AM when referring to parts)
- REV Robotics (can be shortened to REV)
- TETRIX Robotics (can be shortened to TETRIX)
- ServoCity
- FIRST® Tech Challenge (can be shortened to FTC)
- Actobotics
Spacing
Make sure to keep 1.5 spacing throughout the binder (the only exceptions are for the header row in the daily entry photo tables and for sets of pictures that take up more than one row; these should have single spacing).
To divide sections (use your best judgement to determine sections, however, a good rule of thumb is whenever the header changes), add spaces afterwards instead of indenting. Do this by going to Format > Line Spacing and clicking on the “add space after paragraph” option. For consistency, add said spaces after paragraphs of normal text (this includes sets of bullet points) not before or after headers and titles.
On title/header pages, if the title/header takes up one line (example: The Team) leave 13 lines of blank space (with each line having size 12 Oxygen font and 1.5 spacing). If the title/header takes up two lines (example: Business and Strategic Plan), instead leave 10 such lines of blank space. This should already be set, but use these guidelines when creating new title/header pages.
When adding pictures, have them wrap text with a ⅛” margin (for pictures that supplement a certain paragraph of text) or in line (for pictures that take up the majority of the page width, pictures in a table, and pictures that are the main subject).
Page & Section Breaks
To create new pages, instead of repeatedly hitting enter until you reach a new page, use ctrl/command+enter. To create new sections, go to Insert > Break > Section Break (continuous means the new section starts on the page, while next page means that it will create section break and then create a new page, similar to a page break).
Inserting Headers Using Text Styles
To create new pages, instead of repeatedly hitting enter until you reach a new page, use ctrl/command+enter. To create new sections, go to Insert > Break > Section Break (continuous means the new section starts on the page, while next page means that it will create section break and then create a new page, similar to a page break).
On one last note, USE TEXT STYLES (on the 2nd editing bar (the one below the File/Edit/View/etc. bar, the one that says “Normal text”), they’re there for a reason! That way you have consistent formatting and easier navigation of the document, especially using the Document Outline (View/Show document outline).
Other
Binder guidelines might change so READ THE FTC DOCUMENTS THEY GIVE YOU AT THE START OF THE SEASON!
Logo
This was our first logo design. Since Omega is actually a letter in the greek alphabet, we had this logo reflect that. We decided on the orange and blue colors because orange represents fascination and success, while blue represents intelligence and trust, which are qualities that we thought were very important to a robotics team. However, we eventually had to scrap this logo because it started to become a bad luck charm, which we attributed to the fact that Omega is the last letter in the greek alphabet, and we were coming pretty close to last at our competitions. Also, the logo is very bland and we’re a very spicy team. (Ananya)

This was our second logo design. It was designed by one of our future Omega members. It features our mascot, Dusty (page 9), who is wearing some safety goggles because while our team likes to be adventurous in our designs, we know that as a robotics team, we’re handling dangerous equipment, and it is good to take precautions. The main color of this design, which is red (chosen after a very close vote), represents our determination to move past the setbacks we had faced in the past and restart, better than ever. (Ananya)

This is our third logo. We adjusted the face of our Dusty because some people at one of our qualifiers last year thought that Dusty was a goat. (He’s not. Dusty is a proud golden-doodle.) We decided to go back to a blue logo since, like we had before, blue represents intelligence and trust. We also realized that 1) the only person who likes maroon is Nidhir and 2) blue represents RAVENCLAW (from Harry Potter) (a.k.a. Best Hogwarts house, a.k.a. creativity and wisdom and learning). Initially we added gears and tools in the shape of a greek wreath since Omega is a greek letter, but then we realized we could do even better and put it in the shape of the letter omega. It still kind of looks like a wreath so that’s cool. (Ananya)
Resources & Contact Information
FTC 9656 would not have been able to achieve half of the things that it did this season without the invaluable help and generosity of many resources. Here, we’d like to give a thank you to everyone on the FTC Discord, Reddit, and other platforms that have assisted us throughout this season.
Special Thanks
- Stella Seo (STREAM Education Foundation) for providing a 501(c)3 nonprofit
- Madan Bellam (Allstars United) for their generous support, outreach opportunities, and donations
- Freeman Orthodontics for their generous donation
- Friends and family of Omega, who provided their generous donations, support, and rides to meeting
- Ryan Brott for creating their Roadrunner library, which we used to build trajectories for our autonomous code
- Arjun from FTC 9794 Wizards.exe for his invaluable binder feedback
- Members of the FTC discord for their advice and support
Contact Information
- Team email: evhsomega@gmail.com
- Kevin Tran, Mentor: zxthalo79604@gmail.com
Team Links
- Team Website: omegarobotics.wordpress.com
- Facebook Page: facebook.com/evhsomega
- Sponsorship Packet: bit.ly/sponsoromega
- Project Pickup Website: evprojectpickup.wordpress.com
FIRST Links
- FIRST Tech Challenge Website: firstinspires.org/robotics/ftc
- FIRST Norcal Website: norcalftc.org
Treasury Custom Functions Code
/** |
Team Protocols
Last updated: 11 November 2019
Effective: 2019-2020
Protocols
Purpose
The following protocols are mostly for ease of organization and logistics, and to have a written record of what members are responsible for.
Team members should not be expected to follow every little detail in this document every single time. Rather, these protocols are a guide containing instructions that are highly recommended to be followed for a smooth workflow.
Updates
If any team member believes that the protocols need to be updated, they can use Suggesting mode on this Google Doc and write up the new protocol (or remove an old one).
Then, the person who suggested an update should change the date next to “Last updated:” and notify all team members of the updates.
If approved by a majority of the team, the new protocols go into effect 1 week after the update. Otherwise, the update is removed from the protocols document.
Roles
Here at Omega we try to be as egalitarian as we can. The roles outlined below are exactly what they are: Roles, not titles or ranks. If you have a specific role besides member, make sure to fulfill your duties!
- (Co-)Captain - Leads and oversees the entire team. Omega uses a dual captain structure to make sure that the team has leadership even if one captain is unavailable. They have equal power, and should work together. They have ultimate responsibility over the team.
- Technical Leads
- Mechanical Lead - Leads and oversees the mechanical team (see Mechanical section)
- Programming Lead - Leads and oversees the programming team (see Programming section)
- Design Lead - Leads and oversees the design team (see Design section)
- Safety Captain - Reminds members to be safe and records safety violations (see Safety section)
- Secretary - In charge of team organization and logistics; oversees the team files (see Binder and Google Drive folder sections)
- Treasurer - In charge of keeping track of team finances, seeking/staying in contact with sponsors, and collecting donations (see Treasury section)
- Historian - In charge of organizing team photos (see Photos section)
- Web Developer/PR - In charge of updating the team website (see Website section) and updating the team’s social media (see Social Media section)
- Member - Everyone in Omega is automatically a member of the team
Captain/Technical Lead Criteria
- Must be an active member of Omega for at least 1 school year
- Must demonstrate leadership skills, initiative, and responsibility
- Must be knowledgeable in either robotics in general (Captain) or in their respective field (Mechanical, Programming, or Design Lead)
Membership
- Upon joining the team, every person is given membership status
- Membership status can be lost if:
- Member commits 3 major safety violations
- Member attends less than 60% of meetings during the season
- An excused absence is defined as an absence that the member notified team leadership about before the start time of the meeting through the Omega Attendance Excuse Form
- Excused absences do not count against a member’s attendance and is marked as E on the Attendance spreadsheet
- Member does anything that is extremely:
- Dangerous (anything that would cause others harm, physically and/or mentally)
- Damaging to team culture (e.g. being rude, discriminatory, etc.)
- Unlawful
- Member violates any established rules of EVHS Robotics Club, FTC Omega 9656, or Evergreen Valley High School that results in loss of membership in the club/team
- The team has more than 15 members and cuts need to be made based on a member’s value to the team
- Loss of membership can be appealed, but it is up to the Captain(s) to decide whether membership status is restored to the member who is appealing based on the protocols outlined above
Sustainability
- The team officers (members with specific roles) are responsible for making sure the team can be sustained after they have graduated
- This means that skills should be transferred throughout the season and especially during offseason
- Leads and members with experience should:
- Let newer members work on the robot/code/CAD while overseeing their work for quality
- Encourage questions
- Explain thoroughly
- Create guides and lectures during offseason to train newer members
Safety
- Use common sense. If you think it’s probably not safe, it’s probably not safe.
- Use safety goggles and gloves to protect your eyes and hands, especially when using power tools and when you’re in the pit during competitions
- If you have longer than collarbone-length hair, you must tie up your hair (in a bun, ponytail, or other style as long as it’s out of the way) to prevent it from getting tangled in the robot or machinery
- Be careful around electronics, parts that move, and heavy parts
- Please let us know if…
- You are moderately or severely allergic to anything
- You have any dietary restrictions/preferences
- You have any other issues or concerns
- The Safety Captain should collect such information using the Safety Information Form
- The Safety Captain should record any major safety violations on a spreadsheet (the definition of “major” is decided by the Safety Captain and Captain(s), but must be within reason)
- The record should indicate any members involved in the violation, what happened, and any injuries that occurred
- Safety violations strike system
- 1 major violation = Warning
- 2 major violations = Warning and training for proper safety practices
- 3 major violations = Loss of membership
- The Safety Captain will lead a safety training session for the team every year for new and returning members
- The Safety Captain will also administer a safety practices/rules quiz to all members at this training session
- Members must score 80% or higher to work in the garage; members who score less than 80% must retake the quiz until they meet the threshold
Mechanical
- Every year, the Mechanical Lead should give new members a brief overview of how the build system works, the parts of a robot (ex. drivetrain, intake), etc.
- New members should be given the knowledge and skills necessary to assemble and disassemble prototypes
- New members should also read Game Manual 0 (abridged) (they can also read the full one if they want, but it’s 204 pages…)
- All members should have basic mechanical skills (assembling components) so that everyone can do maintenance.
Programming
- Members should learn how to use Git for version control
- Our team currently uses GitLab (the original reason for this was because GitLab allowed us to have private repositories, but now both GitLab and GitHub support private repositories)
- Members should have working knowledge of Java and the Command Line
- Members should download and install Android Studio on their laptops
- Every year, the Programming Lead should give new members access to the FTC 9656 group on GitLab (or the equivalent on GitHub)
- Here is a video by former Programming Lead Tommy Vo Tran about how Omega’s code is organized
Design
- All CAD files for the team are stored in the Omega 9656 Project
- Every year, the Design Lead should give access to the project for new members, and remove access for graduating members
- Any designs for the team should be organized into the Design folder, under the correct year/season, and under the correct competition (if applicable)
- Robot parts should be organized by manufacturer
- For the goBILDA library, it should be further split into sections based on the main purpose of the part, then type of part, then series number
- When uploading STEP files from goBILDA to the team’s goBILDA library, keep the full part number in the name but add any other relevant information such as length, diameter, bore type, etc. after the part number
Binder
- Read and follow the format and style instructions outlined in the Binder Template
- DO NOT edit the template directly. Make a copy of it instead (click on the link at the bottom of the cover page)
- New binders should be titled with the year first (ex. 2019-2020 Omega Engineering Binder)
- This is so that it’s easier to see which binder is which, because Google Drive only displays a certain amount of characters for the file’s name before it gets cut off (if you put the year at the end, it won’t be visible right away)
- If you attend a meeting or other event (ex. Outreach, Qualifier), please write at least 1 substantive thing in the relevant binder entry
Treasury
- All Treasury files should be stored in the Treasury folder of the 9656 Omega Files Google Drive folder
- Each school year/season should have its own spreadsheet, divided into 3 sheets: Income, Expenses, and Summary (which contains the current balance and other financial insights)
- For an example of a spreadsheet (you can also use this as a template), click here
- Make a copy of the spreadsheet, do NOT edit it directly
- Here is the JavaScript code for the CONTLEVEL, ACTINC, and TOTALCOST functions, which can be used on the spreadsheet linked above (to edit this script, go to the spreadsheet, then Tools > Script editor): (Check appendix for code)The treasury spreadsheet should be kept protected so that only the Captain(s), Treasurer, and Secretary can edit data
- The template does not automatically do this, so after making a copy of the template be sure to set permissions for all 3 of the protected sheets
- The Treasurer is responsible for recording all income and expenses onto the spreadsheet
- Members are responsible for alerting the Treasurer if they donate/buy anything that is related to the robotics team
- Members are responsible for filling out the Omega Member Donation form if they donate to the team, and the Treasurer is responsible for recording that data accordingly
- For donation protocols, please see the Omega Donation Protocol document
Google Drive Folder
- Any files related to the team on Google Drive should be moved into the overall shared folder called 9656 Omega Files and organized accordingly
- Do NOT use link sharing to give team members Can edit access
- Link sharing should ALWAYS be set to Can view so that only authorized members can edit files (or OFF - only specific people can access) - sometimes we put files on our website (ex. our binders), and when link sharing is set to Can edit, anyone (on our website or otherwise) can edit that file!
- Instead of using link sharing for Can edit access, send invitations to edit or comment using team members’ email addresses
- Every year, the Secretary should give new members access to team files via their email addresses (see above) and remove graduating members’ access
- New members’ access to the FTC Omega 9656 Files folder should be set to “Can view” until they demonstrate commitment to the team (e.g. attending meetings consistently)
- Specific files/folders should also be set to “Can view” if the information they contain is sensitive or should not be edited by new members
- It is up to the Secretary’s and other officers’ discretions in terms of file permissions, but they should be reasonable
- If graduating members currently own a file/folder, they should transfer ownership of that file/folder to evhsomega@gmail.com
Photos
All of Omega’s photos are organized in the Google Photos library of evhsomega@gmail.com.
Local Photos
From your phone
- Download the Google Photos app from the App Store or Google Play Store
- Login to your Google account on the Google Photos app
- Backup your photos to Google Photos (recommended: High Quality so that photos don’t count against your Google storage quota)
- Google Photos will automatically backup all the photos on your camera roll
- However, if you downloaded team photos, they may be in a different folder. In the settings of the Google Photos app, you should be able to choose which folders to back up
- Follow instructions under Remote Photos, From another Google Photos account
From your computer
- Go to Google Photos and login to evhsomega@gmail.com
- Click Upload in the top right corner, or drag and drop local photos into the website
- Once upload is complete, add photos to the correct Album (not Shared Album) or create a new Album
- Follow instructions under Album Creation if creating a new album
Remote Photos
From another Google Photos account
- Organize photos into a Shared Album and share it with evhsomega@gmail.com
- Alternatively, you can create a link to share, copy and paste it into your browser, login to evhsomega@gmail.com, and click Join
- Login to evhsomega@gmail.com’s Gmail, and accept the email invitation to the album by clicking on View Photos
- The link should take you to the Google Photos Shared Album. Click on the cloud with a checkmark icon on the top right corner. When you hover over it, it should say Add to my library. As you can guess, when you click on it, all of the photos on the Shared Album will be added to evhsomega@gmail.com’s Google Photos library
- Click on Google Photos on the top left corner to go to the photos library, scroll to find the photos you just added to the library (it’s sorted from recent to oldest), select all of them, and then press the + on the top right corner
- Pressing + will allow you to add the selected photos to an existing Album or Shared Album or add it to a new Album or Shared Album. Choose Album (either make a new one, or choose an existing Album).
- Follow instructions under Album Creation if creating a new album
- Optional: After adding the photos to a new or existing Album, go to the Sharing page. You should see the album you shared with the evhsomega@gmail.com there.
- If you want, you can click on the 3 dots in the upper right corner of the album cover and then click on Leave album to preserve your privacy.
- If you don’t do this, the album you shared will remain in evhsomega@gmail.com’s Sharing page.
From another remote source
- Download all relevant photos from your remote source
- Follow instructions under Local Photos
Album Creation
- Naming the album
- If the photos are from a meeting: [Season Name] Meeting [#] [Date]
- Example: Rover Ruckus Meeting #38 12/7/18
- If the photos are from a qualifier: [Competition Name] (Qualifier [#], [Season Name])
- Example: American High School Qualifier (Qualifier 1, Rover Ruckus)
- If the photos are from a regional: [Regional Name] [Season Name]
- Example: NorCal Regionals Rover Ruckus
- Other event: Make it descriptive - Add the name of the event, what type of event it was, and maybe even the date/month/season/year
- Example: Chaboya Outreach Summer 2019
- Setting the album cover
- For ease of access, if the album cover is unprofessional, inappropriate, blurry, and/or not representative of the rest of the album, please change the album cover to something else by following these instructions:
- Click on the 3 dots at the top right corner of the Album
- Click Set album cover
- Choose an image that works
- Alternatively, you can click on an image that works, then click on the 3 dots at the top right corner of the image, and click Use as album cover
Why Albums Instead of Shared Albums
- Albums are private, Shared Albums are not - We don’t people looking at our photos unless we want them to
- We can technically still share an Album - If we do want to share the Album though, you can still press the share button at the top right corner
Website
- Follow the format of the existing posts and pages. The key to web design is to keep it short, sweet, and consistent!
- For meeting entries, just copy and paste it from the binder and format it in a web-friendly way
- After every competition, make sure to write a post including a summary, any awards, and a picture gallery. Be sure to show gratitude to our sponsors, family, and team members
- Also update the Awards page and Awards Records page (see below) if applicable
- Every year, update the About, Team Roster, and Challenge pages
- Every photo that you add to the media library should be added to the gallery on the Photos page
- Every time there is an outreach event, update the Outreach page
- When adding photos to the Media Library, the best method is to click on the Photo icon in the top left-hand corner and then choose “Google Photos library”
- Then pick which photos and/or videos you want to add to the Wordpress Media Library, and click “Copy to media library”
- It should already be connected to the evhsomega@gmail.com Google Photos library, but if it isn’t, login to evhsomega@gmail.com if it prompts you to choose a Google account
- See pictures below for reference
- Note: You cannot copy photos from Google Photos to Wordpress if you are using the Wordpress Admin interface
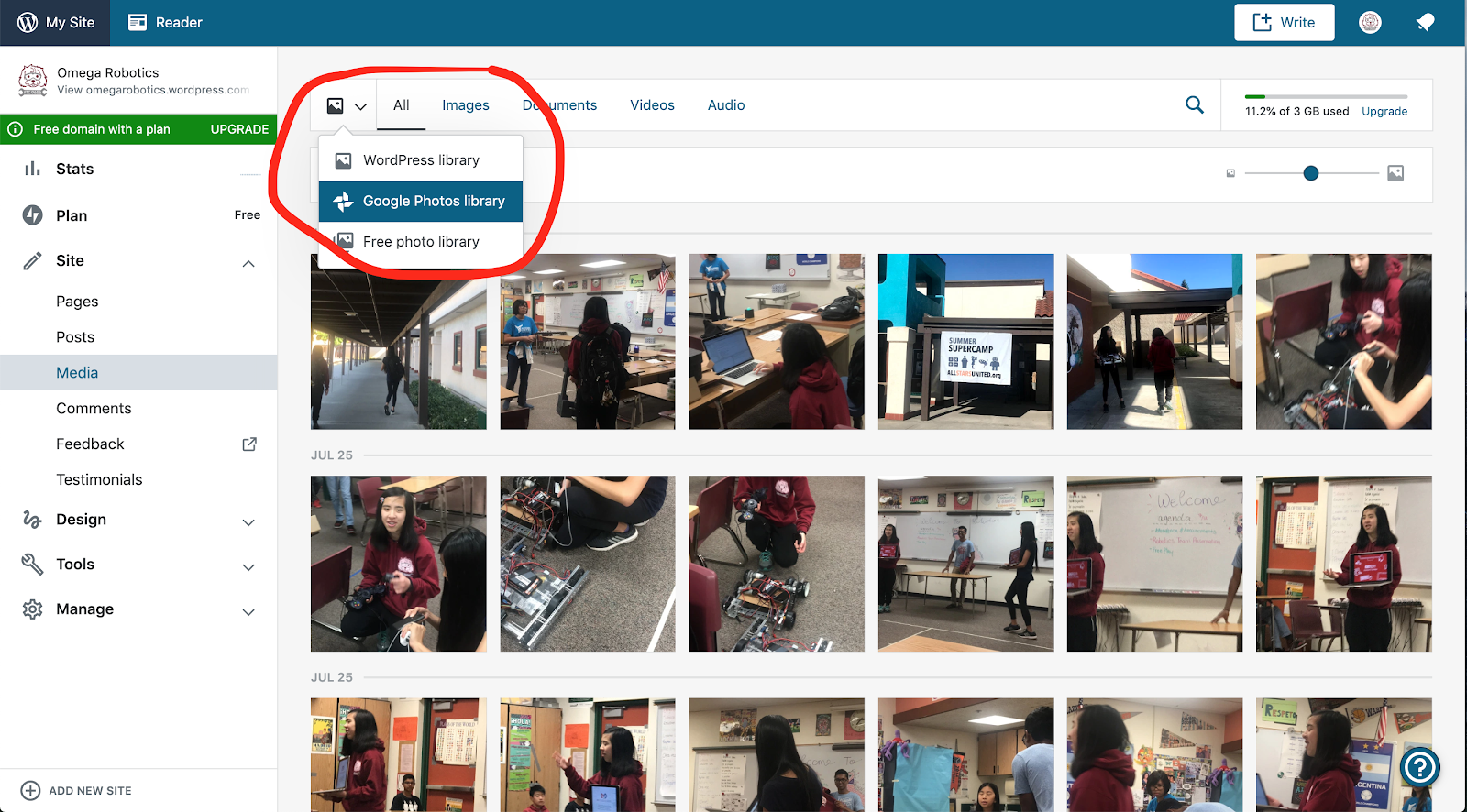
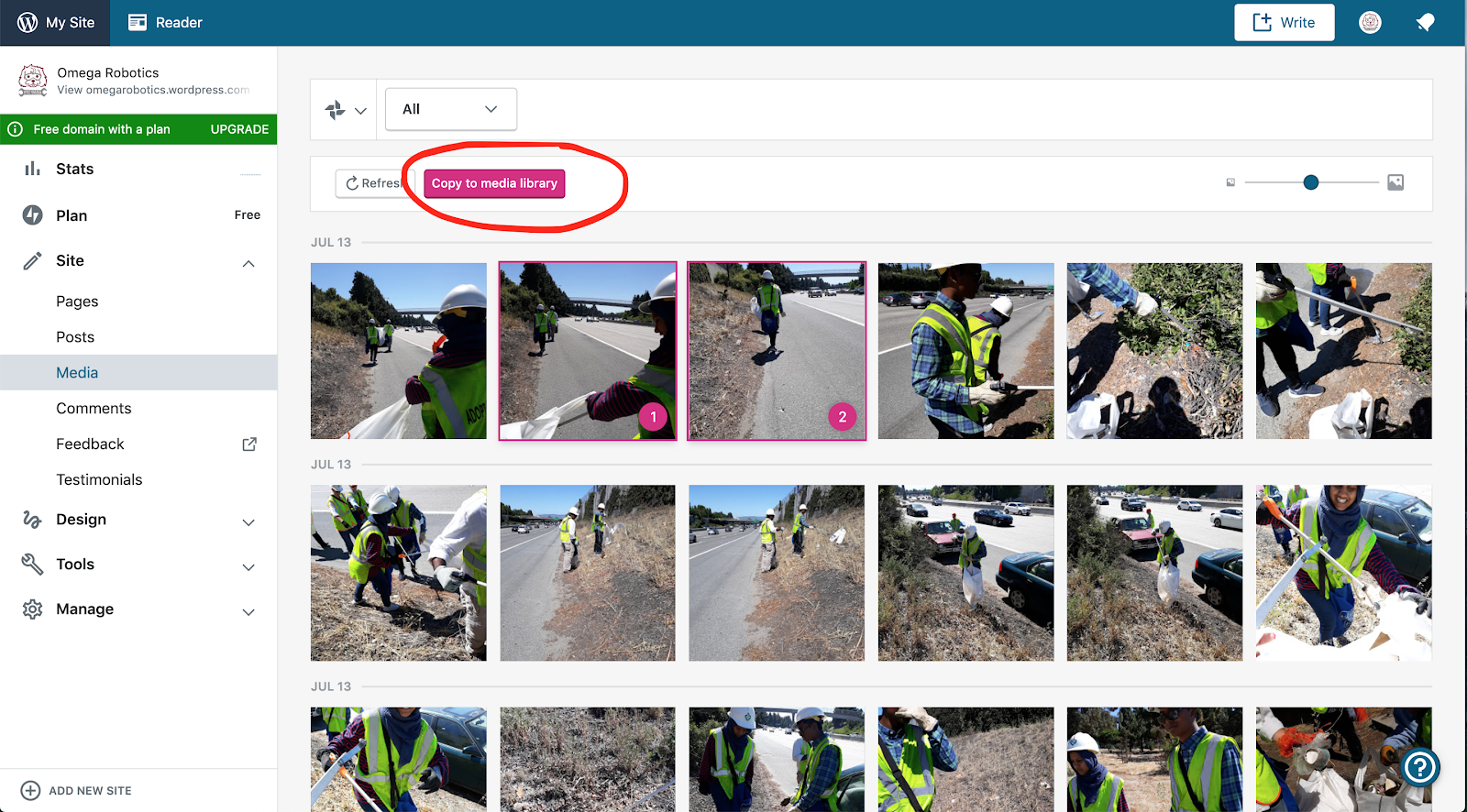
- Just for the sake of keeping records, whenever we win an award (trophy) or runner-up (no trophy), make sure to list all relevant information in the private page called Awards Records. Just follow the format that’s already there (Season, Competition, Award, Person who took the award home or NT [“No Trophy”] or Unknown)
- To edit private pages:
- From Wordpress Admin: Pages > All Pages > Private (see below)
- From regular Wordpress: Pages (see below)
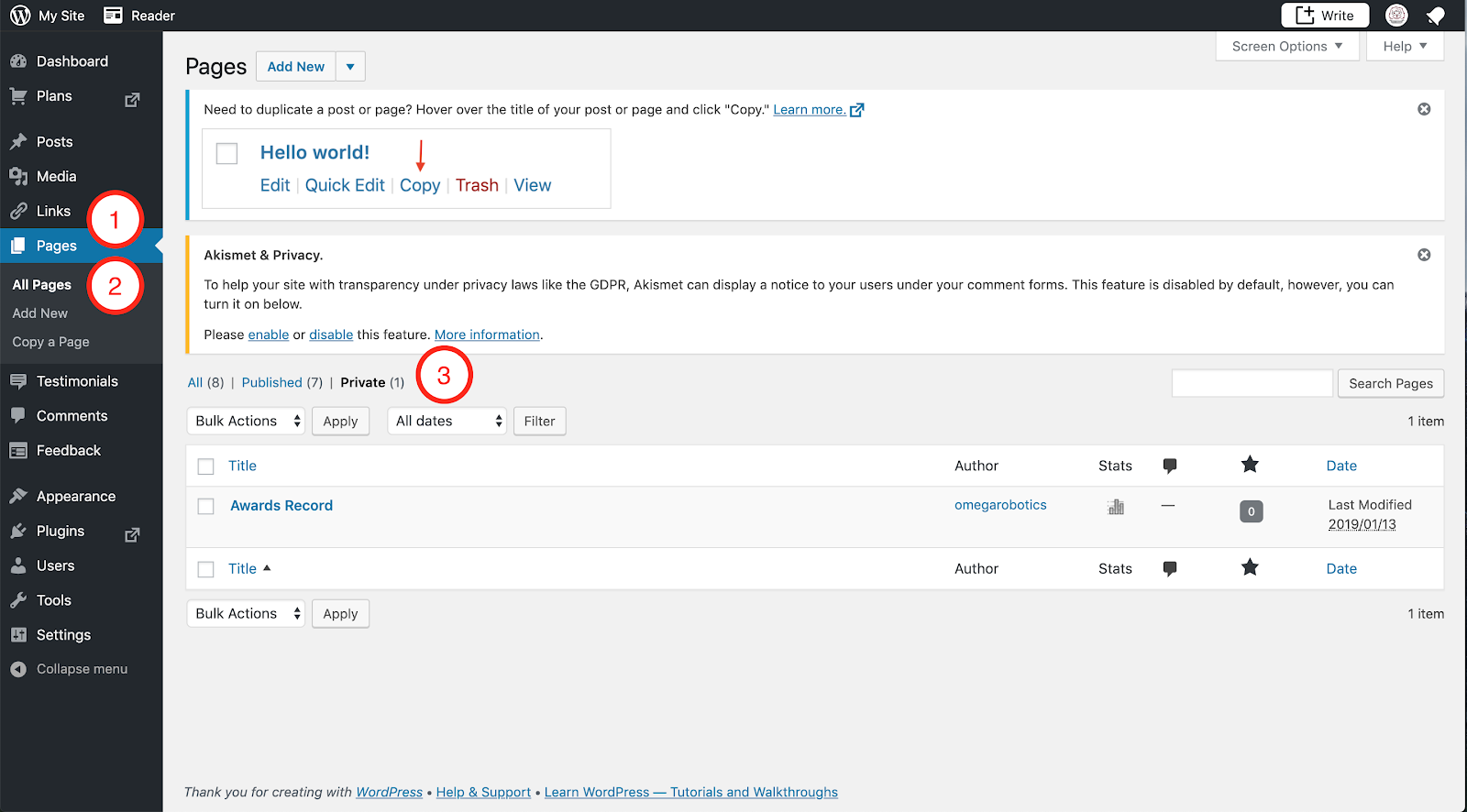
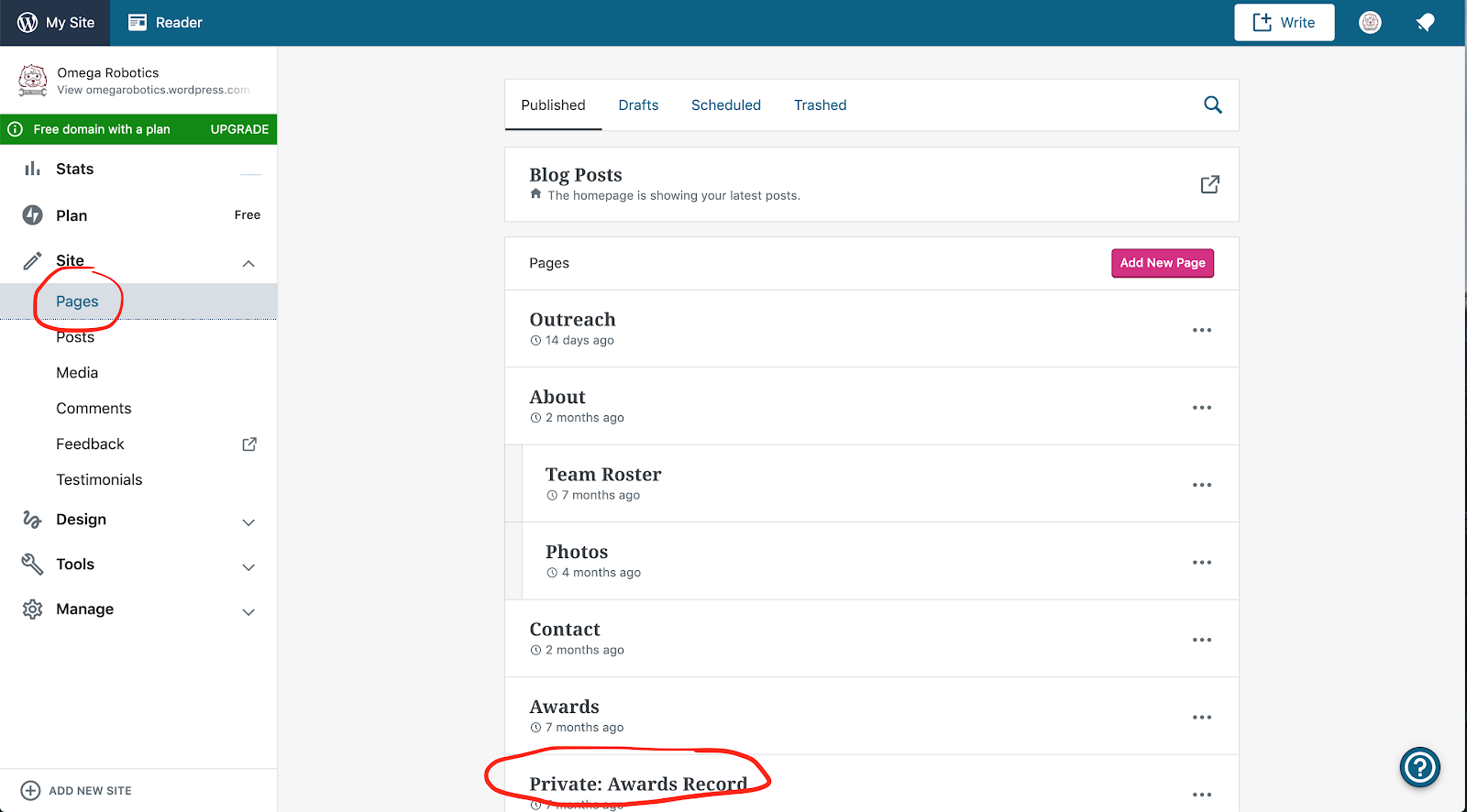
Accounts
The team accounts and login info are CONFIDENTIAL. Please DO NOT share login information outside of the team, and be aware when you use these accounts that they are shared and represent the team to the public. Be appropriate, professional, and responsible! (Account information omitted for public release)
About Us

FIRST Tech Challenge
Our robotics team participates in the FIRST Tech Challenge (FTC), a program that encourages participation in STEM through building, programming, and competing with robots.
Our Team: FTC 9656 Omega
Our team at Evergreen Valley High School was founded in 2015 with the goal of giving students practical experience and education in STEM through robotics. Omega eventually evolved into a team that is also focused on our community — we’ve introduced countless middle school students to robotics, taught introductory robotics courses at our local library, mentored three other robotics teams, and worked with professionals in the STEM industry.

Omega is more than just robotics: in addition to teaching STEM skills, like building and coding, we facilitate personal growth in terms of leadership, public speaking, and art/branding. We’ve accomplished much throughout every the season, such as winning the following awards:
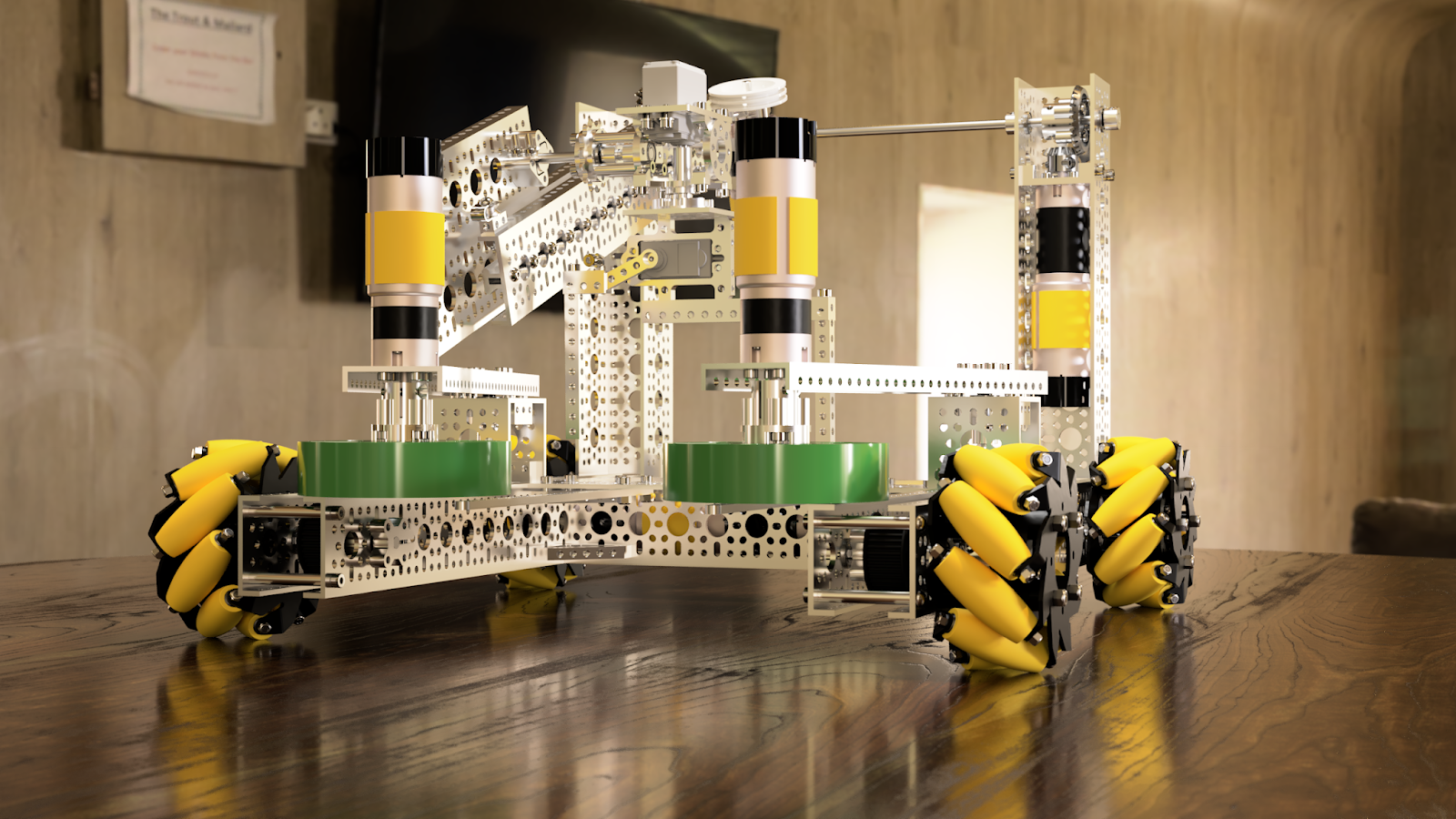
Skystone (2019-2020)
| Rover Ruckus (2018-2019)
| Velocity Vortex (2016-2017)
|
Our Sponsors



Platinum
| Gold
| Silver
|
Monetary Sponsorship
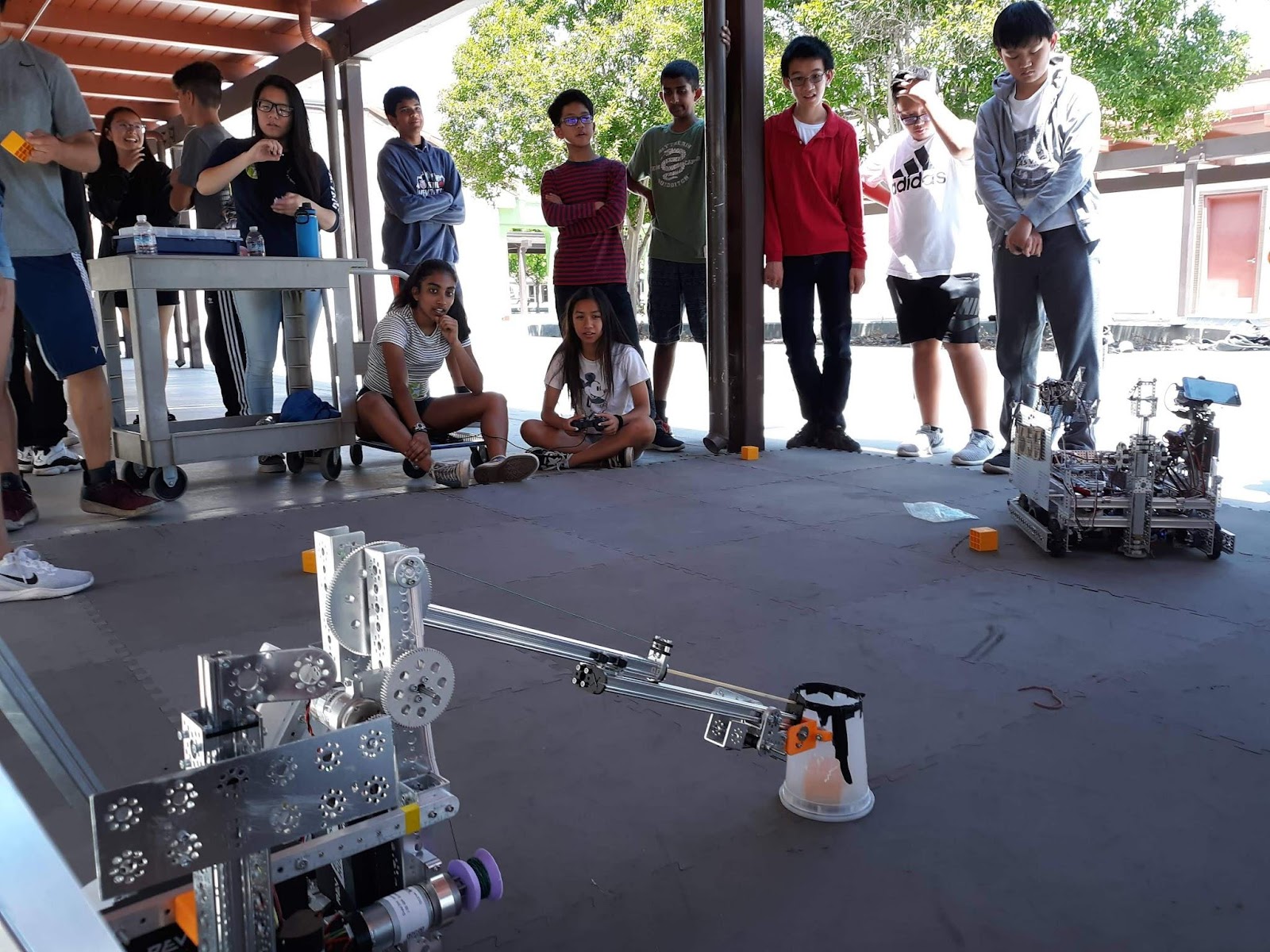
A contribution from your organization would be a game changer, allowing us to purchase better parts for our robot, pay for registration, and take a more active role in the community.
Required Budget: To pay for registration to compete in tournaments each season and pay for elements of the playing field and parts for our robot, the team will need approximately $3,000.
Additional Budget: If the team advances to the World Championships, we will need an overall budget of approximately $7,000 to pay for competition registration, travel, and lodging for the trip. Any leftover money after the competition will go toward outreach events.
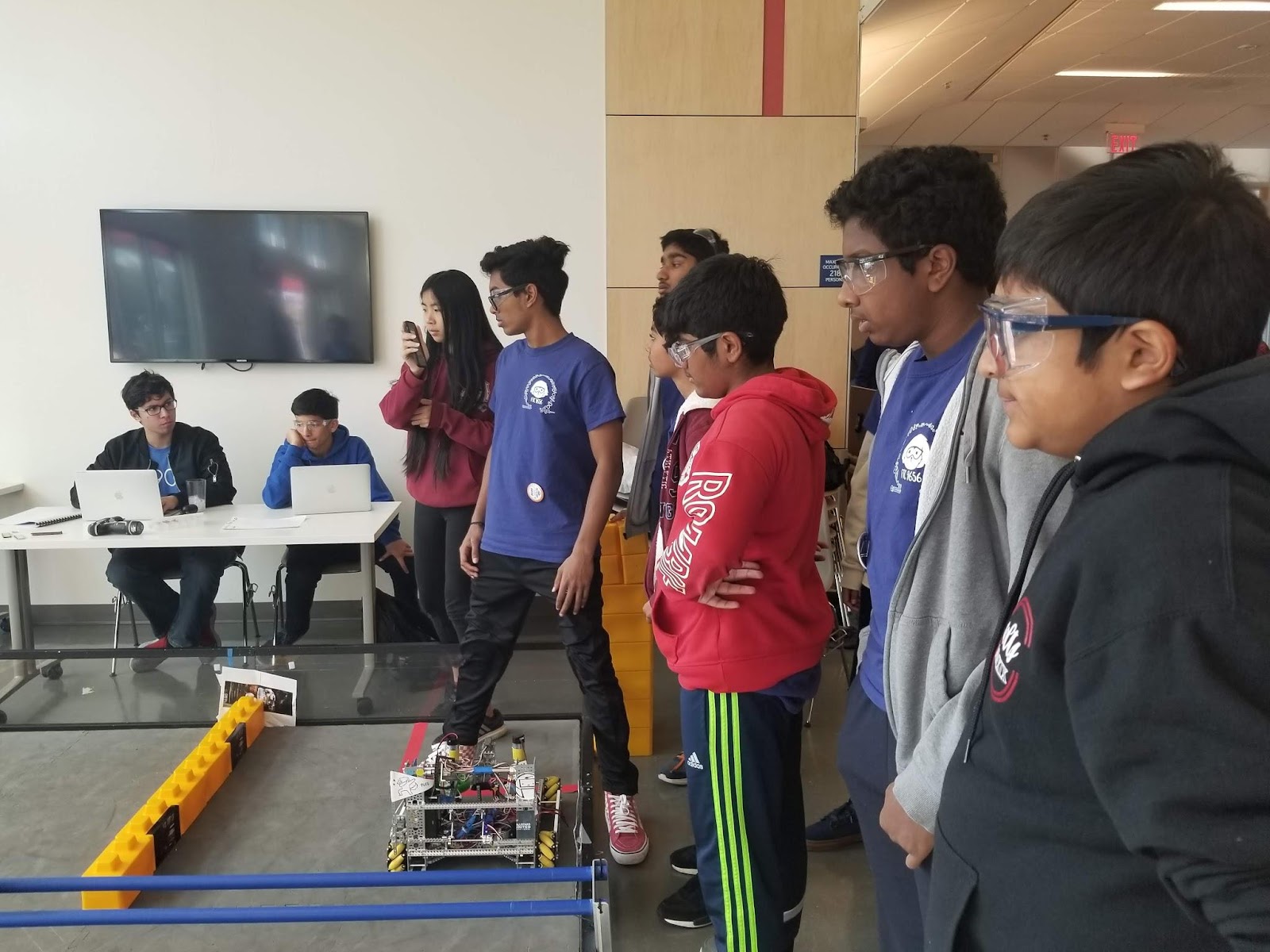
Please email us at evhsomega@gmail.com for more details on our business plan.
If you choose to donate, you will not only receive sponsorship benefits (below), but you will also be helping a group of ambitious high school students learn invaluable teamwork and technical skills, such as CAD or programming.
Our team has also recently partnered with a 501(c)(3) nonprofit, STREAM Education Foundation, which means that any donation that your organization makes is tax-deductible.
Other Sponsorship Options
- Fundraisers - If your business cannot directly support us with a donation, we would greatly appreciate it if we could fundraise at your location. It’s a win-win situation: We get the funds we need and your business benefits from new customers and revenue from our team publicizing the event.
- Access to tools and machinery - Alternatively, if your business has any tools and machinery that could aid us in the design and build of our robot, it would also help us perform better at competitions. Some examples of tools/machinery we are in need of are:
- 3D Printer
- Drill Press
- CNC Machine
- Band saw
- Material donations - Equally important to our team is access to raw materials, such as pieces of metal, polycarbonate, motor controllers, motors, servos, cables, linear (drawer) slides, cable management materials, etc.
- Mentorship - As high school students who aspire to be STEM experts, we’re always looking for knowledgeable individuals to motivate, inspire, and teach us how to improve. A mentor well-versed in mechanical engineering and/or computer science would be vital to our continued success and service to the community.
Continue reading for sponsorship benefits!
Sponsorship Benefits
Sponsorship Benefit | Bronze ($25-199) | Silver ($200-499) | Gold ($500-999) | Platinum ($1,000+) |
Letter of Appreciation | ⬤ | ⬤ | ⬤ | ⬤ |
Mention in our Competition Documentation | ⬤ | ⬤ | ⬤ | ⬤ |
Mention on Website of Level of Sponsorship | ⬤ | ⬤ | ⬤ | |
Facebook Shout-Out | ⬤ | ⬤ | ⬤ | |
Omega Robotics Merchandise | ⬤ | ⬤ | ||
Sponsor’s Logo on Robot | ⬤ | ⬤ | ||
Sponsor’s Logo on Omega Merchandise | ⬤ | |||
Organization Description and Linked on Website | ⬤ |
Please note that the sponsorship benefits listed above can also come from any type of help as described in the Other Sponsorship Options section (above). Non-monetary support given to the team will be based on the MSRP of the item(s) or amount gained from a fundraiser. Any organization that provides a mentor(s) will automatically be awarded silver status.
How to Donate
Omega is currently partnering with a 501(c)(3) non-profit organization, STREAM Education Foundation. If your business or organization would like to donate to Omega, please:
- Make the check out to STREAM Education Foundation
- Include our team number, 9656, on the memo line of the check (because STREAM supports many FTC teams)
- Mail it to the following address:
STREAM Education Foundation
℅ FTC Omega 9656 Robotics
2541 Le Conte Ave
Berkeley, CA 94709
Thank You
We hope that both of us can benefit from our partnership. Thank you for considering to sponsor Omega!
If you have any questions, please contact us at evhsomega@gmail.com.
— OMEGA | —
