Honours Programme Research Proposal 27 June 2023
SCALABLE SEMI-AUTONOMOUS IN-SITU RESROUCE UTILIZATION AND ASSEMBLY STRATEGIES FOR VORONOI-BASED STRUCTURES ON MARS
Feras Alsaggaf
TU Delft (the Netherlands)
HPM Project Proposal 4.10
27 June 2023
Supervisor: Dr. Henriette Bier
Abstract:
This research investigates the in-situ fabrication and assembly of structural components for human habitats on Mars, focusing on material systems and structural design configurations that enable scalability through various autonomous techniques. By analyzing relevant literature, the study aims to understand different approaches to construction on Mars and the associated challenges. Case studies will be selected to identify performance criteria and inform the design recommendation to be discussed in the paper. Through a comprehensive literature review, this research will contribute to the development of a design strategy that addresses the unique constraints and requirements of building in-situ resource utilization (ISRU) on Mars. By leveraging semi-autonomous techniques and considering scalability, the study aims to advance the knowledge and understanding of in-situ construction for future space exploration missions.
Introduction:
As human exploration of space expands and Mar’s planetary conditions are studied further, the challenges of living on Mars become more defined which includes extreme climate conditions (-133 Celsius), thin atmosphere at 1% the density of earth leading to harmful radiation exposure, lack of oxygen, limited water resources, low gravity force, extreme dust storms, distance of communication to/from Earth, supply chain limitations, and self-sufficiency challenges (NASA 2020). Current understanding of Martian geology suggests that there are several potentially habitable zones located near the equator and in several other canyons, plains, and basins where the climate is milder compared to the poles. The European Space Agency (ESA) is developing a system to predict weather and dust storms which is planned for deployment in the next few year (Parfitt 2023). Moreover, a communication and navigation infrastructure consisting of +5 satellites that can provide means for communication, potentially also for the autonomous robotic builders, to assist with exchanging information and mapping out its surroundings (Parfitt 2023). Ice deposits typically found underground and vary in depth, another critical consideration for deciding on location of habitation (Hoffman et al. 2016).
Overview of conditions on Mars (Parfitt 2023):
- Gravity: 3.71 m/s2
- Martian day: 24 earth hours and 37 minutes
- Martian year: 687 earth days
- Average temperature: -55°C
- Minimum temperature: -133°C
- Maximum temperature: +27°C
- Atmospheric pressure: 6,35 mbar (compared to 1013,2 on Earth)
- Atmosphere: 96% carbon dioxide; 1.95% nitrogen; 1.9% argon; 0.2% trace gasses
- Surface area: 145 million sq.km (about the same as Earth land area)
There are many different facets to the mission, therefore, this paper will primarily focus on those three domains: fabrication, assembly, and material science. More specifically examining current state-of-the-art in these domains and relating it to case studies selected from TU Delft’s master studio and workshops, in addition to all relevant scientific literature on this subject including design proposals, lectures, interviews, project reports, and MSc/PhD thesis reports.
One of the biggest limitations that will guide the direction of this paper is payload of rockets. For every kilogram of weight it requires more energy expenditure to launch out of Earth’s orbit which increases the cost barrier. Additionally, There should be enough propellers to fly back home from Mars. In-situ resource utilization is a strategy that can have load-reduction benefits as well as establishing a material supply chain on Mars. Researchers are investigating cement-free concrete mixes sourced from regolith Martian soil to support in-situ resource utilization (ISRU) to construct components and reinforce tunnels (Bier et al. 2021).
The literature provides multiple different strategies to build on Mars which includes inflatables, regolith shell structures, ice structures, 3D-printed bio-based composite polymer structures, subsurface structures (in lava tubes), and so on. The degree of autonomy varies from semi to fully-automated swarm robotics running a production line (Irawan et al. 2020). The aim of this paper is to provide highlight the different methods of fabrication, assembly, and material properties to formulate design recommendations based on the findings of this paper.
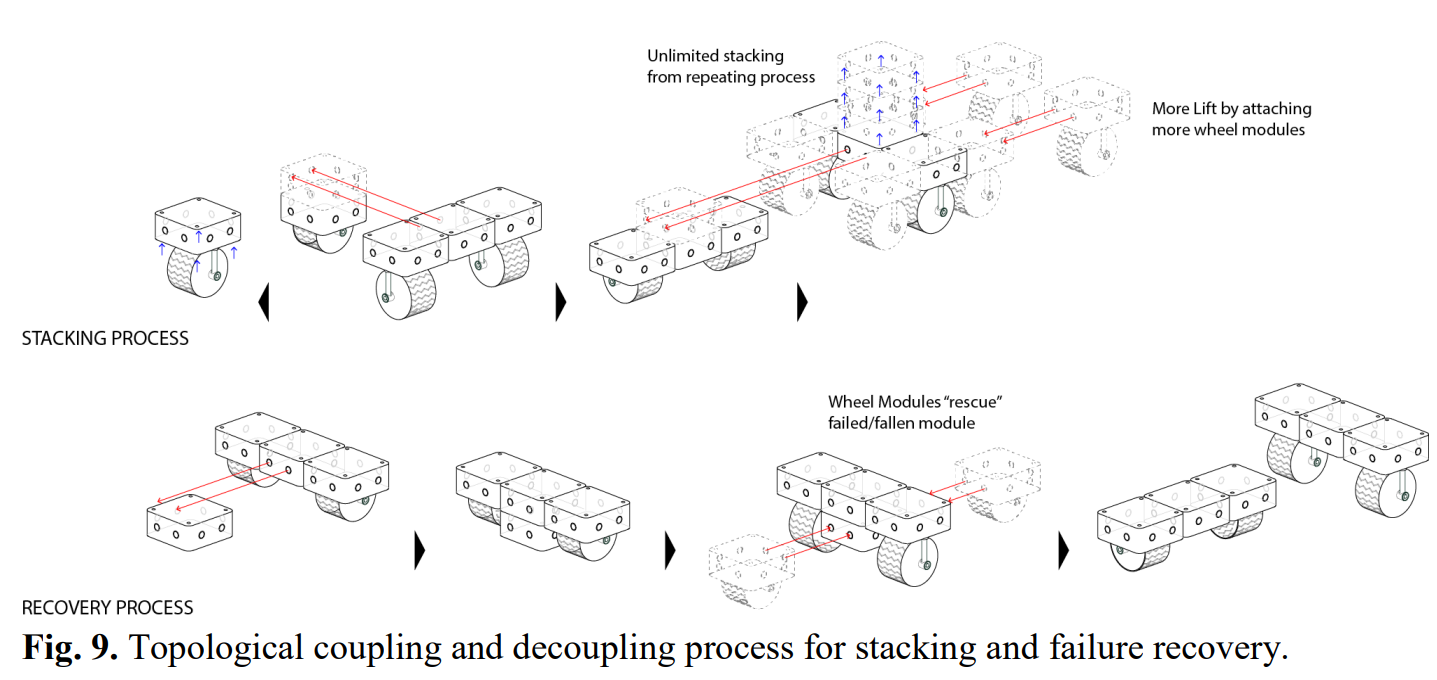
FIGURE 1: Modular swarm robotics that fuses regolith into building material (Irawan et al. 2020)
Problem Statement and Research Question:
Building in an extreme environment is the root of the problem statement. There are many challenges to building on Mars, this paper will focus on the aspect of constructing habitats in such place. On-site automated construction methods face context-specific challenges; the challenges will be defined for the context of Mars in great detail. Furthermore, the research will seek to answer the question of how ISRU can support scalable building on Mars. Answering this question can have scientific impact on cement-free concrete which will improve the sustainability performance of a critical material commonly used in construction.
The societal value generated from this research can include highlighting advancement in robotic construction using cement-free concrete mix that might lead to radical transformation in construction materials. Moreover, the practical implications of automation in general, and this research in specific, include highlighting robotic approaches that add value to human life working on construction sites such as increased safety, reduced physical strain on human labor, and automated consistency in construction processes, while the theoretical implications involve the exploration of new methodologies and strategies for building in extreme environments such as Mars.
Research question
What are the advantages, limitations, and methods of scaling up Voronoi-based building components on Mars, considering ISRU technical constraints, material sourcing strategies, material properties, robotic design and programming?
Additional sub-questions for consideration: How do each strategy compare to one another with respect to supporting scalable building? What are the ways life support system can be integrated in the fabrication or assembly process? What are the advantages and limitations of Voronoi-based structural systems? How does pre-fabrication approach differ from ISRU?
Some of the preliminary angles to be considered are:
- Changing production conditions (assembly challenges)
- Performing site-specific fabrication
- Building at scale especially in the vertical direction
- Deployment procedures
- Equipment monitoring, optimization, and operational challenges
- Sourcing and processing raw material
- Hardware and sensors limitations such as arm reach and (robot arm) payload capacity
- Control system for human operators
- Programmed behaviors and tasks of automated robot builders to perform critical tasks
- Life support integration and embedded environmental control systems
- Air tightness
- Structural stability achieved through geometry
Methodology:
Robot-to-Robot and Human-Robot Interaction will be the basis of the building workflow. The research will envision what the future of construction will look like by examining current state-of-the-art technologies from robotics, computer vision, and artificial intelligence. More specifically, assembly of components for building off-Earth habitats based on the research from the European Space Agency funded Rhizome project. Case studies will be selected from the master studio/workshop to develop the research based on performance criteria that will be determined in the next stage of the research after examining the case studies. Some criteria might include:
- Manufacturability
- Material efficiency (utility cost)
- Scalability (in the vertical direction)
- Robotic builders strategy: deployment, fabrication, and assembly.
A human and robot taxonomy will be established to identify each function and rules of interaction in the assembly process, and how they support each other’s functions for building the habitats. Finally, this will be demonstrated in the paper by incorporating these techniques in a design recommendation to illustrate how this might address the problem statement and provide deeper insights into the subject matter.
The procedure of establishing performance criteria for assessment will be examined in further detail to design an experiment and obtain performance values from simulation of structural analysis and thermal efficiency in the context of Martian climate design. The design of the experiment will be determined after completion of case study reviews in order to decide the tools necessary to evaluate performance criteria of different case studies.
The study will be performed in three milestones: case study / literature review, establishing performance criteria, conducting experiment / design strategy recommendations. While the experiment and design strategy recommendation is still a work in progress, it should aim to synthetize all the observations from the case studies to test different design options and propose the most suitable design recommendation for the research questions.
Timeline:
- Stage 1 (Q2): research paper abstract (complete)
- Stage 2 (Q4): presentation of proposal to HPM committee (complete)
- Stage 3 (Q4): research proposal (complete)
First Milestone
- Stage 4 (Q5): case study review and literature review
Second Milestone
- Stage 6 (Q5-Q6): establishing performance criteria
Third Milestone
- Stage 7 (Q6): experiment design conditions / design strategies
- Stage 8 (Q7): results and reflections
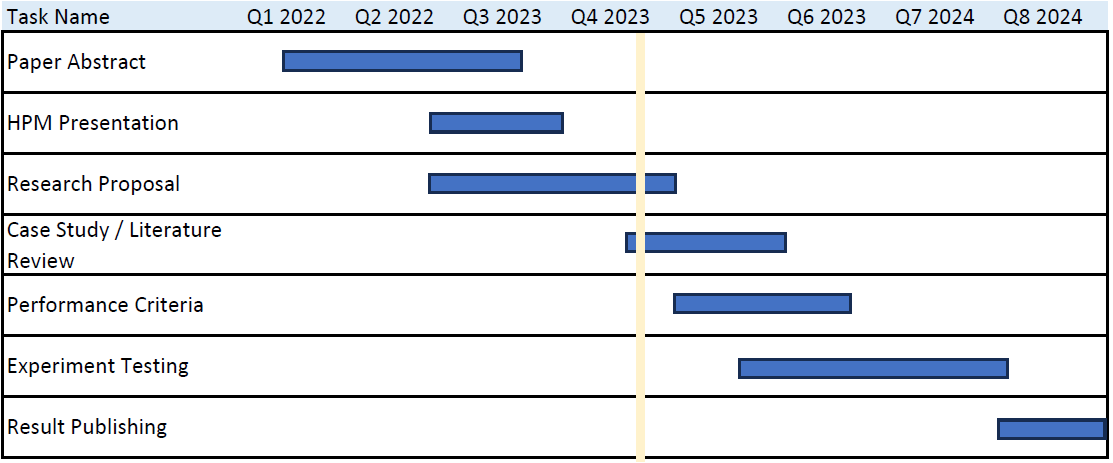
Blue = duration of stage. Gold stripe = current stage as of 27 June 2023
Literature Review:
The literature will provide current knowledge, techniques, and technologies that can be examined to formulate a deeper understanding on the current state-of-the-art and design recommendation.
Case Studies (Rhizome 2.0):
Mars Habitat (Decorte, Fiseryte, Punte 2023) from Workshop 4.0

Settling in Cracks of Mars (Behoodi, Joshi, Sahingoz 2023) from Workshop 4.0

Communal Housing Typology on Mars (Bianco et al. 2023) from Workshop 4.0
MSc 2 2023 Studio (to be published by end of Msc 2 2023)
Each of these case studies vary greatly in their approach to building and material sourcing. Examining these cases will shed light on what the commonalities are between them, how they defer in strategy, and evaluating the designs from the performance criteria to be established in the research.
Special consideration will be given to material systems, energy source requirements, structural design configuration, robotic building approaches.
Moreover, a literature review will be conducted on the following subjects:
- Printing with cement-free concrete
- In Situ Printing and (AI & HRI supported) in situ assembly of 3D printed components
- Computer vision and human-robot collaboration; Design-to-Robotic-Assembly (D2RA)
Preliminary Data:
The preliminary data for this research proposal consists of a list of case studies and relevant literature that will be examined in the study. The case studies primarily focuses on Rhizome 2.0 case studies specifically the ones addressing ISRU approach for building on Mars. Potential candidates include Mars Habitat, Settling in Cracks of Mars, Communal Housing Typology on Mars, and the MSc 2 2023 Interactive Architecture Studio from TU Delft, while also briefly reviewing earlier case studies such as Rhizome 1.0, Autonomous Additive Construction on Mars, MARSHA AI SpaceFactory, Space Exploration and Clouds AO's Ice Habitat, and X-House. These case studies will provide valuable insights into different approaches to building on Mars and will be used as a reference to develop the performance criteria for this research.
In addition to the case studies, the literature review will contribute to the understanding of current state-of-the-art techniques and technologies in the field. The literature will also provide insights into the challenges and limitations of material fabrication and assembly on Mars and will inform the design recommendations to be discussed in the research.
Anticipated Output:
The anticipated research output includes a synthesized case study research paper to be published as an article, a robot and human tasks taxonomy, and an exploration of robots collaboration in terms of local vs global goals and rules of interaction. These outputs will contribute to the advancement of knowledge in the field of in-situ fabrication and assembly of structural components for human habitats on Mars.
Conclusion:
In conclusion, this research proposal aims to address the challenges of building on Mars by investigating scalable semi-autonomous in-situ resource utilization and assembly strategies for Voronoi-based structures. The study will analyze relevant literature and case studies, establish performance criteria, and design experiments to obtain data on performance metrics based on Martian conditions. The research aims to contribute to the development of design recommendations that consider material sourcing strategies, robotic design and programming, and the integration of life support systems. By leveraging semi-autonomous techniques and addressing scalability, this research has the potential to advance the knowledge and understanding of in-situ construction for future space exploration missions.
References:
Behoodi, M., Josh, S., Sahingoz, M. (2023). Settling in the cracks of Mars [case study]. Retrieved June 1, 2023, from http://cs.roboticbuilding.eu/index.php/Shared:2023W4G2Design
Bianco, C., Sauer, D., Waszkiewicz, M., Simon., Sitchiman. (2023). Communal Housing Typology in Martian Habitat [case study]. Retrieved June 1, 2023, from http://cs.roboticbuilding.eu/index.php/Shared:2023W4G4Design
Bier, H., Khademi, S., van Engelenburg, C., Prendergast, J. M., & Peternel, L. (2022). Computer vision and human–robot collaboration supported design-to-robotic-assembly. Construction Robotics, 6(3-4), 251–257. https://doi.org/10.1007/s41693-022-00084-1
Bier, H., Vermeer, E., Hidding, E, & Jani, K. (2021). Design-to-robotic-production of underground habitats on mars, 8(2). Retrieved June 1, 2023, from https://doaj.org/article/f9329c39d19f4f9e90b731bc8a04780b
C. Parfitt (2023). Future Mars Missions at ESA [Lecture]. Retrieved June 1, 2023, from http://cs.roboticbuilding.eu/index.php/2023IALectures
Coppola, L., Bellezze, T., Belli, A., Bignozzi, M. C., Bolzoni, F., Brenna, A., Cabrini, M., Candamano, S., Cappai, M., Caputo, D., Carsana, M., Casnedi, L., Cioffi, R., Cocco, O., Coffetti, D., Colangelo, F., Coppola, B., Corinaldesi, V., Crea, F., … Pedeferri, M. P. (2018). Binders alternative to portland cement and waste management for sustainable construction—part 1. Journal of Applied Biomaterials & Functional Materials, 16(3), 186–202. https://doi.org/10.1177/2280800018782845
Dada, H., Belaidi, A. S. E., Soualhi, H., Kadri, E.-H., & Benabed, B. (2021). Influence of temperature on the rheological behaviour of eco-mortar with binary and ternary cementitious blends of natural pozzolana and marble powder. Powder Technology, 384, 223–235. https://doi.org/10.1016/j.powtec.2021.02.019
Decorte, A., Ounte, T., Fiseryte, A. (2023) Mars Habitat [case study]. Retrieved June 1, 2023, from http://cs.roboticbuilding.eu/index.php/2023IALectures
Djobo, J.N.Y., Elimbi, A., Tchakouté, H.K. et al. Volcanic ash-based geopolymer cements/concretes: the current state of the art and perspectives. Environ Sci Pollut Res 24, 4433–4446 (2017). https://doi.org/10.1007/s11356-016-8230-8
Hoffman, S., Andrews, Alida., Watts, K. (2016). “Mining” Water Ice on Mars: An Assessment of ISRU Options in Support of Future Human Missions [slideshow]. NASA. Retrieved June 1, 2023, from
Irawan, J., De Kestelier, X., Argyros, N., Lewis, B., Gregson, S., & Gengnagel, Christoph, Prof. Dr., 49493031852991, 494930 3185 2992, gengnagel@udk-berlin.de, Structural Design and Engineering, University of the Arts Berlin, Berlin, Germany. (2020). Impact: design with all senses : proceedings of the design modelling symposium, berlin 2019. In A reconfigurable modular swarm robotic system for isru (in-situ resource utilisation) autonomous 3d printing in extreme environments (pp. 685–698). essay, Cham : Springer International Publishing : Springer. https://doi.org/10.1007/978-3-030-29829-6_53
Isachenkov, Maxim & Chugunov, Svyatoslav & Akhatov, Iskander & Shishkovsky, Igor. (2021). Regolith-based additive manufacturing for sustainable development of lunar infrastructure – An overview. Acta Astronautica. 180. 10.1016/j.actaastro.2021.01.005. Retrieved June 1, 2023, from https://www.researchgate.net/publication/348388603_Regolith-based_additive_manufacturing_for_sustainable_development_of_lunar_infrastructure_-_An_overview
Jiawen, L., Hui, L., Lijun, S., Zhongyin, G., John, H., Qirong, T., Haizhu, L., & Ming, J. (2022). In-situ resources for infrastructure construction on mars: a review, 11(1), 1–16. https://doi.org/10.1016/j.ijtst.2021.02.001
Lee, Yoon-Si & Keys, Courtney & Tereno, Saratu. (2022). 3D Printed Martian Habitats and Challenges to Overcome. 10.37591/rrjosst.v11i1.3344. Retrieved June 1, 2023, from https://www.researchgate.net/publication/361907074_3D_Printed_Martian_Habitats_and_Challenges_to_Overcome
Lieveloo, J. (2023). TermiteSim: Developing a termite-like builder swarm simulator for experimentation and validation of control strategies [MSc thesis]. Retrieved June 1, 2023, from https://repository.tudelft.nl/islandora/object/uuid%3A2f82b762-0fe7-44c1-9d87-792166f37ffe
Morris, Michael & Ciardullo, Christina & Lents, Kelsey & Montes, Jeffrey & Rudakevych, Ostap & Sono, Masa & Sono, Yuko & Yashar, Melodie. (2016). Mars Ice House: Using the Physics of Phase Change in 3D Printing a Habitat with H2O. Retrieved June 1, 2023, from https://www.researchgate.net/publication/307965857_Mars_Ice_House_Using_the_Physics_of_Phase_Change_in_3D_Printing_a_Habitat_with_H2O
Mueller, R. P., Prater, T. J., Roman, M., Edmunson, J. E., Fiske, M. R., & Carrato, P. (2019). NASA Centennial Challenge: Three Dimensional (3D) Printed Habitat, Phase 3. 70th International Astronautical Congress (IAC), Washington, D.C., 21-25 October 2019. Retrieved June 1, 2023 https://www.nasa.gov/sites/default/files/atoms/files/mars_ice_drilling_assessment_v6_for_public_release.pdf
NASA. (2020). What is Mars? Retrieved from https://www.nasa.gov/audience/forstudents/5-8/features/nasa-knows/what-is-mars-58.html
Nicola, S., Vincent, V., & Haroutioun, A. (2020). Pozzolan based 3d printing composites: from the formulation till the final application in the precision irrigation field, 14(43), 43–43. https://doi.org/10.3390/ma14010043
University of Technology Delft. (2019). Rhizome: Development of an Autarkic Design-to-Robotic-Production and -Operation System for Building Off-Earth Rhizomatic Habitats. Off-Earth Manufacturing and Construction (of Habitats). Retrieved June 1, 2023 https://docs.google.com/document/d/1mhVsgoEXEYoK15unSvxkDXwVpIuzrSBbU75VOPGs6Lg/edit
USGS. (2014). Geologic Map of Mars [Map]. Retrieved June 1, 2023, from https://www.usgs.gov/media/images/geologic-map-mars
Wilkinson, Samuel & Musil, Josef & Dierckx, Jan & Gallou, Irene & De Kestelier, Xavier. (2016). Autonomous Additive Construction on Mars. Retrieved June 1, 2023 from https://www.researchgate.net/publication/303407153_Autonomous_Additive_Construction_on_Mars
Yashar, M., Ciardullo, C., Morris, M., Pailes-Friedman, R., Moses, R., Case, D. (2019). Mars X-House: Design Principles for an Autonomously 3D-Printed ISRU Surface Habitat. 49th International Conference on Environmental Systems. University of Colorado, Boulder CO. Retrieved June 1, 2023, from https://hdl.handle.net/2346/84478


