Interactive Architectural Prototyping
Typological Optimization and Parametric Design for Martian Habitat Construction: Integrating Aquaponics into a Self-Supporting 3D-Printed Structure
Team
Henriette Bier, Arwin Hidding and Vera Laszlo (RB lab); Seyran Kahdemi and Casper van Engelenburg (AiDAPT lab); Micah Prendergast and Luka Peternel (CoR lab); Henryk Gujda; Julka Lewandowska; Mikolaj Waszkiewicz; Zeynep Yelken
Keywords
Off-Earth Habitat; Data-driven Voronoi-based Design; Design-to-Robotic-Production and Operation (D2RP&O); Computer Vision (CV); Parametric Design; Mars habitat, Aquaponics, 3D printing, Environmental Control and Life Support System, AI, ISRU
Collaborators/ Partners
Advenit Makaya (ESA) and Volker Ruitinga (Vertico)
Abstract
The purpose of this research is to explore Design-to-Robotic-Production & Operation (D2RP&O) that employs In-situ Resource Utilization (ISRU) for constructing a habitat on Mars. The approach involves typological optimization and parametric design techniques to create a self-supporting 3D printed structure that can be robotically maintained by the use of Computer Vision (CV), Artificial Intelligence (AI) and robotics while integrating Environmental Control and Life Support System (ECLSS). The developed typological optimization and parametric design framework serve as a foundation for the subsequent phase of the research, which focuses on incorporation of aquaponics (a symbiotic system combining aquaculture and hydroponics) that enables the seamless integration of aquaponics components, optimising spatial and structural requirements while creating an interconnected ecosystem within the habitat. The result is a fully enclosed pressurized living environment that can house 4 astronauts for an indefinite amount of time. Additionally a computer vision algorithm for crack detection in 3D printed concrete based on machine learning is developed to make sure the structure can maintain its structural integrity and provide a safe living environment.
Introduction
Space exploration and colonization of Mars have become significant objectives for future space missions which creates a need for an integrated approach and studying different approaches of constructing habitats that can provide safe, habitable and sustainable presence on extraterrestrial bodies. Some of the biggest challenges linked to life on other planets are to a large extent linked to the limited payload of rockets. Transportation of large amounts of construction material, food, furniture or clothes becomes infeasible to transport forcing researchers to look at other alternatives. The most viable and affordable option becomes ISRU with D2RP&O. It aims to revolutionize habitat extraterrestrial construction while balancing the most feasible techniques while integrating other cutting edge technologies including CV and AI.
The most abundant construction material that would be feasible for construction identified to date is regolith - the upper layer of unconsolidated, loose crushed rock. This rock can then be sintered and used to print structures and roads prior to astronauts arrival to the planet. The habitat is then designed in such a way that it is possible to be fully produced by 3D regolith printing. The shape of the habitat follows the same logic. The use of additional supports and formwork is avoided at all costs. To overcome this problem, the main structure follows the shape of inverted catenary lines which makes the structure work almost entirely in compression. It is modeled computationally and follows the very same principle that Antoni Gaudí used in designing Sagrada Familia. This makes the structure to be extremely stable, removes the bottlenecks of assembly and removes the need for bringing any construction material other than for electronics and a pressurizing chamber which is necessary to enter and leave the building.
Additionally, to remove the need for food shipment, a part of the ECLS - food production is integrated into the structural walls of the habitat. It is done by selecting a fragment of a wall on which a structural analysis is performed that reveals into which parts of the wall the aquaponic pods can be incorporated together with the necessary infrastructure.
Lastly, the choice of the location builds upon the previous research in the Rhizome 1.0 project [1]. This implies building inside a lava tube to substantially reduce radiation level, and help with temperature swings. Additionally, Arsia North is being chosen for good potential for kite wind power and a large amount of caves [1]. Additional locations have been explored while considering proximity to additional materials such as ice [2].
Research Methodology and Design
The process of designing the habitat can be divided into several parts which create the logic of the project. It was an interactive process which started off with imitation of similar projects and exploration of different techniques which allowed for learning about the pros and cons of building vertically versus horizontally using the preadopted method of 3D printing. What followed was the choice to build horizontally as that removed many of the constraints that a vertical construction would impose. This also allowed for creating a structure that was working purely in compression in a much simpler manner and no arches had to be developed to support any of the floors or vertical circulation platforms. The rest was an iterative process around this principle that followed stages of development of the floor plan, form finding, structural optimisation and designing with structural optimisation.
The most efficient way for a catenary compressive structure would be to use circles for room delineation which would help to create shapes similar to domes which perform well structurally. However, the connection between each circle is not as efficient as in the rectangular logic. Furthermore, a metaball logic was considered to optimize the connections however it was found that an outline based on a Voronoi works well with respect to optimizing material usage as well as could be used for further detailing and optimization of structure both on the surface and within.
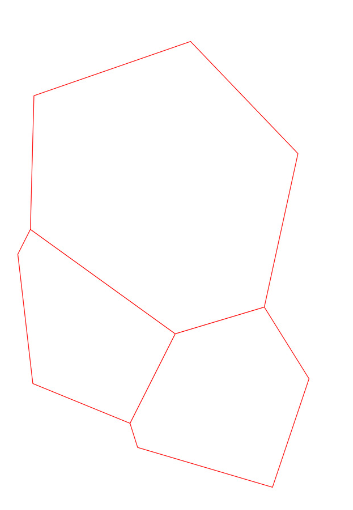
Figure 1: The spatial disposition - initial Voronoi outline of the habitat
The computational methods for form finding and structure were inspired by Linking Hanging Chain Models to Fabrication [2], a software made to explore the potential of dome structures. However, similar results could be easily achieved in Grasshopper, a powerful parametric modeling tool. With a large open source community and a lot of resources online it became apparent this software was the best choice for this task. The catenary structures, as well as their structural analysis were achieved with use of Kangaroo and Karamba 3D. This allowed for a visual analysis of the performance of the structure and selecting the most optimal one for the design of the habitat. The main criteria was to find a structure which performs well structurally minimizing outliers. This can be done simply on the method of visual comparison. Additionally, the structure had to perform well in spatial terms. That is its height required by the catenary logic must be reasonable with its spatial qualities and suitable for 3D printing, hence the largest dome is 14m high in the middle while the smaller domes are 4 and 4.5m high respectively.
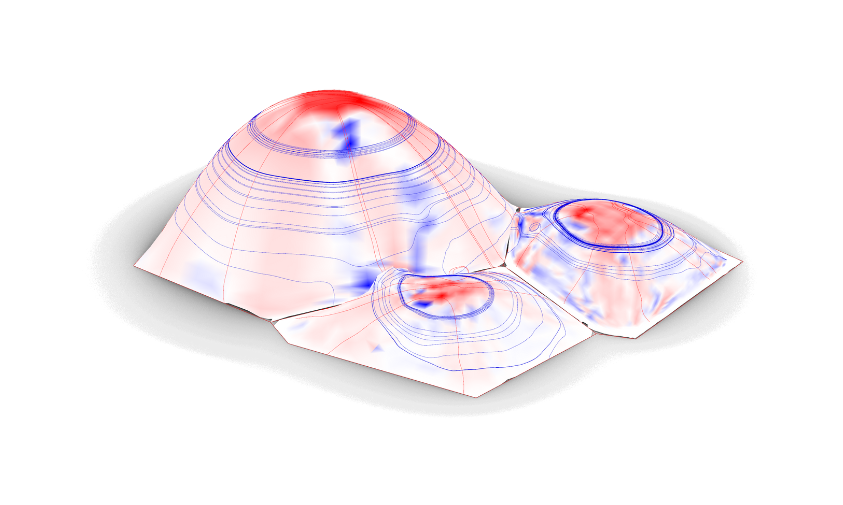
Figure 2: Result of the structural analysis performed in Karamba3D
Subsequently, a wall fragment at an intersection of two domes was chosen for further development and detailed integration of aquaponics, acoustic textures and infrastructure including the piping of the aquaponic units. Narrowing down the scale and scope of the project to a smaller fragment was necessary due to the limited computational power that then required finding a correct amount of loads and setting vectors coming from multiple directions.
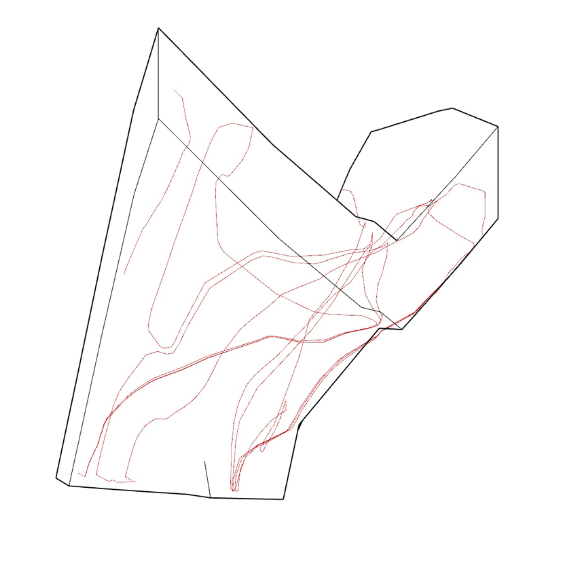
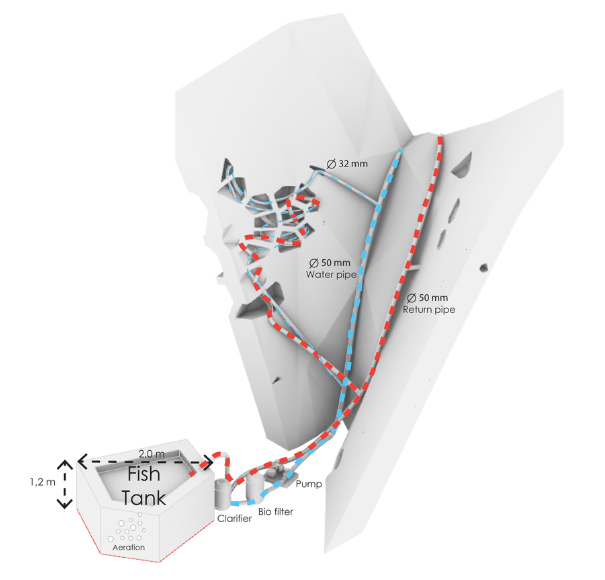
Figure 3: Compressive stress line analysis and aquaponic units infrastructure
This was a necessary step in employing a logic where the areas with stresses of lower magnitude were perforated for the purpose of integrating aquaponics and densifying the places where the stresses are greater for the structural optimization. For this, a Grasshopper script using a curve attractor and Voronoi formed a basis as a logic for dividing the shape of the wall. The result of the work was then tested on a smaller fragment that was 3D printed on a number of scales 1:100, 1:50, 1:10. which became a proof of concept that is suitable to be 3D printed without the need for additional formwork or prefabrication of structural elements to be 3D printed in concrete in 1:1 scale to further investigate the feasibility of the concept. Consequently, 3D printing technology is a crucial construction method that enables autonomous construction of the habitat a step ahead of a manned mission to mars while allowing a flexible design that offers malleable fabrication possibilities of not only structures but also furniture and integration of infrastructure and parts of life support systems.This would be critical in ensuring that astronauts have a safe living environment before a decision to inhabit the red planet for a longer amount of time.
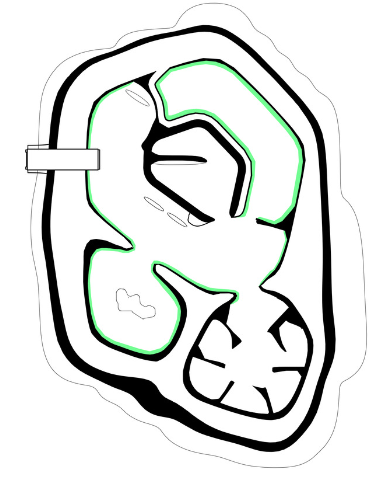
Figure 5: Distribution of Aquaponics


Figure 5: Proof of concept - 3D printed models of chosen fragments
3.1 Conclusions
The research focused on exploring different design proposals that employed different types of materials, however largely limiting the scope to ISRU to significantly reduce the payload of any space mission while exploring D2RP&O, typological optimization and parametric design techniques specific to off earth habitats was successfully explored. By optimizing the design parameters, such as structural integrity, thermal insulation, protection from radiation, and in-situ resource utilization, the habitat can withstand the harsh Martian environment. Additionally, 3D printing technology is employed as the primary construction method, enabling rapid and adaptable habitat fabrication. The integration of robotics into habitat construction and maintenance processes is a crucial aspect of the D2RP&O approach. Robots equipped with advanced capabilities, including mobility, manipulation, and autonomous decision-making, will enable efficient maintenance and operation of the habitat. These robotic systems will work in tandem with astronauts to address any issues, conduct repairs, and ensure the habitat's optimal functionality. Computer vision technology plays a vital role in the continuous monitoring and safety of the Martian habitat. By employing computer vision algorithms, the habitat can be visually inspected for structural anomalies, such as cracks or weaknesses in 3D printed concrete. A machine learning-based algorithm specifically designed for crack detection ensures the habitat's structural integrity, minimizing the risk to astronauts' safety. Additionally, to achieve long-term sustainability, the research proposes the integration of aquaponics, a symbiotic system combining aquaculture and hydroponics, into the habitat design. Aquaponics enables the cultivation of plants and the rearing of aquatic animals, creating a self-supporting ecosystem. This integration optimizes spatial and structural requirements while ensuring a renewable food source for the astronauts.
The research described in this paper presents an integrated approach for Martian habitat construction, encompassing typological optimization, parametric design techniques, robotics, computer vision, and aquaponics integration. By combining these advancements, a self-supporting and sustainable living environment for astronauts on Mars can be achieved. This research lays the groundwork for further exploration and development of extraterrestrial architecture, ultimately paving the way for human habitation beyond Earth's confines.
3.2 Study Limitations
The study is limited in a number of ways. In terms of simulating a 3D printing process on mars we are limited to our gravity and materials. Access to regolith simulants is limited thus 3D printing in PLA has been used to demonstrate the stability and printability of the design.
Further experimentation with 1:1 printing is going to be undertaken, however regolith simulants are not easy to get hands on thus printing with regular concrete is going to be attempted at later stages of the study. The results are going to differ substantially as the setting of the concrete will have a completely different chemical reaction thus any form of physical studies on the printed element will not replicate the actual conditions on mars. The results are also affected by the difference in gravity which is approximately 3 times higher on earth. Which means that what does not work here in terms of loads for 3d printing might behave completely differently on mars. For this it would be needed to simulate a 3D printing process in a digital environment using martian gravity which is outside the scope of this study.
With respect to structural integrity of the design, lateral forces on the structure that could be present due to winds and sandstorms present on mars have been ignored in the structural analysis as there is limited research into this topic, as well as accounting for radiation would to a larger extent outperform the need for any. Additionally, as the object would be internally pressurised the outcome of the structural forces used for the allocation of the aquaponic pods might be totally different.
Additionally other unknowns like the length of the stay on Mars can still not be pinpointed accurately even by the European Space Agency and varies between two weeks and two years which could have an effect on the speculated design.
Acknowledgements
We especially grateful for the tutoring provided to Henriette Bier that tutored us throughout the entire project and taught us a lot from the design choices to conceptual integrity of the contemporary architectural approached and style, as well as planned out the course in an extraordinarily organized way maximizing our learning capabilities by motivating us to explore atypical approaches to architectural design and expanding the learning possibilities to other domains though putting us in touch with tutors with a wide range of experiences and expertise to which we are also grateful. These include Arvin Arwin Hidding and Vera Laszlo (RB lab) who were crucial in the development of the script for the selected fragment and 3D printing scale models, as well as Seyran Kahdemi and Casper van Engelenburg (AiDAPT lab) who helped with the development of the Computer vision algorithm and were kind enough to present us with the knowledge on AI rarely accessible to architecture student.
- Bier, H., & et al. (n.d.). Rhizome: Development of an Autarkic Design-to-Robotic-Production and -Operation System for Building Off-Earth Habitats. https://docs.google.com/document/d/1LTRhiiAVrlg0artZGrsVVkvVhr4TXfp3/edit#heading=h.l19yqf7vzsox
- South polar layered terrains. ESA. (n.d.). https://www.esa.int/ESA_Multimedia/Images/2019/03/South_polar_layered_terrains
- Kilian, A. (n.d.). Linking Hanging Chain Models to Fabrication. https://designexplorer.net/newscreens/cadenarytool/KilianACADIA.pdf
Page of