Guía de construcción
Open Science Drone Toolkit

Guía de construcción — Open Science Drone Toolkit Versión 4 – abril de 2022 | Este documento está disponible bajo licencia Creative Commons Atribución-CompartirIgual 4.0 Internacional (CC BY-SA 4.0). Usted es libre de compartir, copiar y redistribuir el material en cualquier medio o formato, adaptar, remezclar, transformar y construir a partir del material, para cualquier propósito, siempre que se dé crédito de manera adecuada a los autores de la obra (Proyecto Vuela) y se indique si se han realizado cambios. Si remezcla, transforma o crea a partir del material, debe distribuir su contribución bajo la la misma licencia del original. Este documento está disponible en vuela.cc/toolkit para descargar, leer, comentar y modificar. Esta Guía es parte del Open Science Drone Toolkit desarrollado por el Proyecto Vuela - Más info en vuela.cc |

Contenidos
Qué se puede hacer con el Open Science Drone Toolkit
Componentes del Open Drone Toolkit
Listado de materiales y herramientas
Paso 1: Armado de la estructura
Paso 2: Instalación del firmware de la placa controladora
Paso 3: Conexión de variadores de velocidad y motores
Paso 4: Colocación de los componentes en la estructura
Instalación de los componentes de software
Canon Hack Development Kit (CHDK)
Introducción
Los drones pueden ser una poderosa herramienta para la investigación en disciplinas como la agricultura y las ciencias ambientales, permitiendo la captura de imágenes aéreas con gran flexibilidad. Pero la ciencia abierta requiere instrumentos y materiales abiertos, y los drones no deberían ser una excepción.
Esta Guía forma parte del Open Science Drone Toolkit, un kit de herramientas para hacer ciencia abierta con drones, desarrollado por el Proyecto Vuela. Contiene toda la información básica para construir, configurar y calibrar el dron OVLI y otros componentes de hardware, y para instalar el software del Toolkit. Todos estos componentes sirven para capturar imágenes de alta calidad que puedan procesarse para obtener una imagen o mapa de alta resolución del área, para luego obtener información con fines de investigación. La gran mayoría del hardware y software que componen este kit son de código abierto.
El documento original de esta Guía (en Español) se encuentra abierto para realizarle mejoras, hacer sugerencias y comentarios, en formato Google Docs. Por favor, intenta hacer preferentemente las sugerencias con la función de comentarios, y sólo introducir texto o modificar las imágenes si estás segura de no alterar el formato del documento, ya que las versiones Web y PDF que están disponibles en la página se generan automáticamente a partir del Google Doc.
Más información
- Proyecto Vuela: vuela.cc
- Open Science Drone Toolkit: vuela.cc/toolkit
- Google Doc de esta guía: https://docs.google.com/document/d/1tggZiuJUs4auH8q10i0Y0hu3n_9OcOXIdaILVW9r6xw/edit
Qué se puede hacer con el Open Science Drone Toolkit
El OSDT es un conjunto de herramientas de hardware y software de código abierto y también guías y protocolos para que el usuario pueda realizar todas las tareas necesarias para obtener datos aéreos:
1. Identificar un área de estudio | Especificar los límites del área que se medirá, ya sea in situ o utilizando imágenes aéreas o satelitales georreferenciadas | |
2. Diseñar un plan de vuelo | Diseñar la ruta de vuelo que seguirá el dron sobre el área de estudio, así como la altitud y la velocidad del vuelo, teniendo en cuenta la resolución de muestreo deseada (cm por píxel), la superposición requerida para la unión de las imágenes y las limitaciones técnicas del dron y cámara | |
3. Seleccionar los parámetros de la cámara | Seleccionar los parámetros óptimos de la cámara (velocidad del obturador, sensibilidad ISO, intervalo de captura automática) de acuerdo con las condiciones atmosféricas en el momento del vuelo | |
4. Hacer un vuelo autónomo | Realizar un vuelo autónomo guiado por GPS sobre el área de estudio, siguiendo el plan de vuelo diseñado, capturando las imágenes necesarias usando parámetros de cámara fijos | |
5. Georreferenciar las imágenes capturadas | Asignar coordenadas GPS a cada imagen de acuerdo con la ubicación precisa registrada por el dron en el momento de la captura | |
6. Procesar las imágenes para obtener un mosaico | Procesar las imágenes capturadas para obtener una imagen ortorrectificada y georreferenciada de la totalidad del área relevada | |
7. Analizar el mosaico para obtener datos | Procesar el mosaico para obtener datos relevantes para la pregunta de investigación, a partir de la imagen completa o para áreas específicas | |
8. Organizar y compartir la información | Organizar y visualizar todos los datos generados (imágenes sin procesar, mosaicos, límites de área, plan de vuelo y registros de telemetría) y metadatos (nombre y descripción del vuelo, fecha y hora, ubicación, etc.) y agrupar todos los archivos para almacenarlos y compartirlos |








Componentes del Open Science Drone Toolkit
Hardware
Dron (dron OVLI)
Cámara (cámara marca Canon compatible con el software CHDK)
Radiocontrol (transmisor genérico de 6 canales)
Baterías y cargador (batería genérica de litio-polímero de 3 celdas y cargador-balanceador)
Computadora (PC portátil genérica con sistema operativo Windows)
Teléfono (teléfono móvil genérico con sistema operativo Android)

Software
Registrador de GPS (GPS Logger)
Estación de tierra (Mission Planner)
Control de cámara (CHDK)
Piloto automático (ArduCopter)
Procesamiento de imágenes (OpenDroneMap)
Procesamiento y análisis de mosaicos (QGIS)
Manejo de datos (Bitácora)

Documentación
Guía de construcción
Guía de uso
Construcción del dron OVLI
Este dron, un cuadricóptero (“quadcopter” en inglés), fue desarrollado a partir del Flone (flone.cc), un dron de código abierto creado por Aeracoop.

El “Flone”
En 2017 fabricamos el Flone, siguiendo paso a paso el manual, y grabamos videos de todo el proceso. En 2018 hicimos modificaciones a aquel diseño y a su funcionalidad. La modificación principal a la estructura fue el largo de las piernas del dron, para poder poner la cámara abajo, la batería arriba y para poder ajustar las bandas elásticas apropiadamente. Además, re-dibujamos la estructura para que sea fácil de modificar; ahora es más cuadrada. Por otro lado, cambiamos la tarjeta controladora (el ‘cerebro’) a una que permite usar un sensor GPS para poder programar el vuelo del dron con antelación, lo que facilita la recolección de datos con fines científicos.
El “OVLI”
Lo que sigue a continuación son las instrucciones de construcción de este nuevo dron libre, que hemos llamado OVLI.
Advertencias de seguridad
Un dron puede ser fácil de construir y de usar (más fácil construir que usar, sin duda). Sin embargo, puede llegar a ser muy peligroso, para nosotras mismas y para otras y otros, por lo que debemos tomar las medidas de seguridad necesarias durante el vuelo.
- Siempre retirar las hélices cada vez que se hacen pruebas de motores o cualquier prueba que involucre que el dron esté funcionando, ya sea que esté en movimiento o detenido. Las hélices pueden causar heridas de consideración.
- Siempre conectar la batería al final de cada proceso (por ejemplo al chequear los motores o luego de realizar un vuelo), chequeando antes que las conexiones sean las correctas y se encuentren en buen estado (que no haya cables desconectados o dañados).
- Asimismo, luego de un vuelo o de una prueba, también lo primero que hay que hacer es desconectar la batería.
- Las baterías LiPo son inflamables, por lo que hay que tomar ciertas precauciones, tales como evitar dejarlas bajo pleno sol o en lugares con altas temperaturas, almacenarlas en una bolsa para baterías LiPo, y utilizar un cargador-balanceador. Es recomendable almacenar las baterías descargadas (o a un voltaje intermedio, 11V aproximadamente) para aumentar su vida útil.
- Es recomendable hacer un chequeo de prevuelo siempre antes de volar, confirmando que todas las partes estén adecuadamente ajustadas. Es ideal que este chequeo sea realizado no sólo por una persona, sino que por al menos 2 personas distintas. En la sección siguiente podrás encontrar la lista de verificaciones prevuelo completa.
- Siempre es recomendable hacer el vuelo entre dos personas, una pilota o piloto al mando del radiocontrol, y un copiloto o copilota a cargo de controlar las variables de telemetría a través de la computadora.
- Cuando se vuela en modo automático, es importante no distraerse, prestar atención permanentemente al dron en vuelo, a las variables de telemetría en la computadora, y conservar el radiocontrol en las manos.
- Durante el transporte asegúrate que el dron no sufra ninguna deformación (por ejemplo, hélices dobladas), puesto que esto puede generar un accidente durante el vuelo. Siempre revisa con detención el dron antes de comenzar a utilizarlo.
- Es conveniente volar con un cuadricoptero de juguete o un simulador (por ejemplo este) antes de volar este dron, puesto que los motores, las hélices o incluso la estructura en sí misma durante una caída pueden generar graves heridas.
Listado de materiales y herramientas
Componentes del dron
Estructura |

La estructura del dron se fabrica a partir de una sola placa de MDF (un material de madera reconstituída) de 56x33cm, y de 5.5mm de espesor. Las distintas piezas del dron se obtienen mediante una máquina cortadora láser, que corta la placa de MDF automáticamente siguiendo un diseño realizado por computadora. Usualmente no hace falta contar con esta máquina, ya que en ciudades medianas o grandes suelen existir empresas que ofrecen el servicio de corte láser, siendo el MDF uno de los materiales más comúnmente disponibles.
El archivo con la última versión de la estructura del dron puede ser encontrado aquí: https://github.com/vuelaendron/vuela/tree/master/estructura (normalmente se envía para cortar en formato DXF o PDF, mientras que el archivo SVG se puede modificar con el software Inkscape) |
Tarjeta o placa controladora PixHawk |

La placa controladora está compuesta por un procesador y todos los sensores necesarios para volar: acelerómetro, giroscopio, magnetómetro, barómetro. El acelerómetro y giroscopio son los mínimos necesarios para estabilizar un multicóptero, el magnetómetro (o brújula) se utiliza para estabilizar el dron en el giro sobre sí mismo, ya que puede conocer de manera absoluta dónde se encuentra el norte magnético de la tierra. El barómetro se utiliza para estabilizar la altura del dron.
Además de los sensores internos, que ya vienen incorporados a la placa, se le conectan otros accesorios y sensores externos, que se listan a continuación (normalmente es posible adquirirlos junto con la placa controladora en un mismo kit).
Botón de seguridad | |
Parlante | |
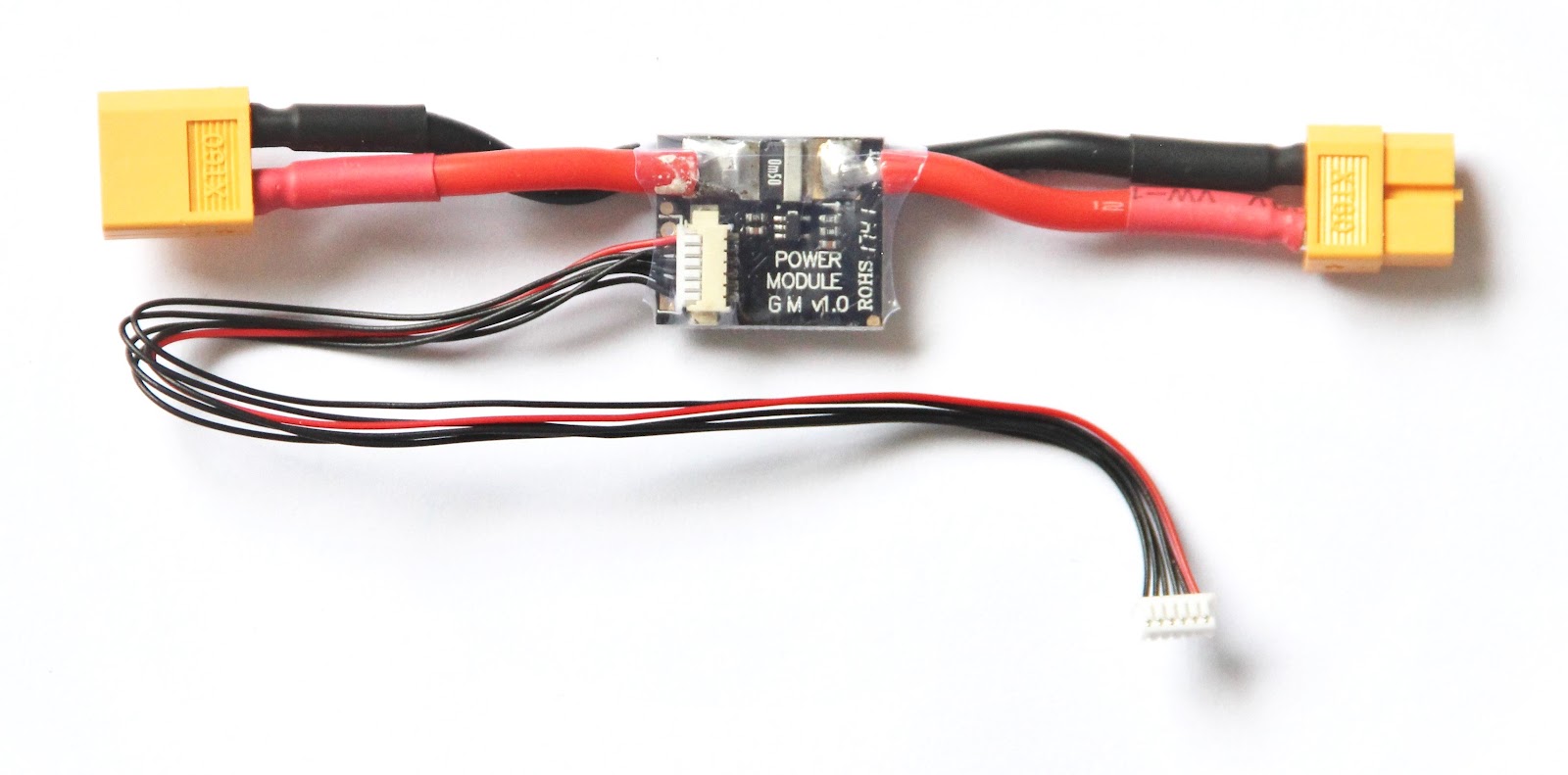
Medidor de voltaje | |
Telemetría | |
GPS y brújula externa | |
Tarjeta de memoria |






El botón de seguridad permite activar o desactivar la conexión entre la placa controladora y los variadores y motores. Al conectar la batería, no será posible que se enciendan los motores hasta que no se presione durante algunos segundos este botón.
El parlante permite a la placa controladora puede reproducir sonidos mediante este parlante. En conjunto con las luces LED ubicadas en la placa misma, permiten indicar al usuario el estado, alarmas, etc.
El medidor de voltaje se conecta entre la salida de la batería y la entrada de corriente de los variadores de velocidad, y envía la información del voltaje y consumo a la placa controladora, además de proveerle alimentación con 5V.
El sistema de telemetría tiene 2 partes: una se coloca en el dron conectado a la placa controladora, y la otra se conecta mediante a USB a la computadora. Ambas se comunican por radio para enviar desde el dron toda la información del vuelo en tiempo real, y también para realizar la configuración desde la computadora sin necesidad de cables.
El GPS se utiliza para poder volar el dron de forma autónoma siguiendo una misión programada. El GPS también cuenta con una brújula (adicional a la que ya viene incorporada a la placa), ya que puede estar colocada en una posición que tenga menos interferencias de campos magnéticos. El GPS+brújula se recomienda que se coloque en un “mástil” (que se suele conseguir aparte) por encima de la altura de los motores, para recibir menos interferencias.
Las tarjeta de memoria se coloca en la placa controladora, y allí se registrará todo lo que suceda durante el vuelo, a modo de “caja negra”.
Radio control de 6 canales | |
Receptor PPM de 6 canales |

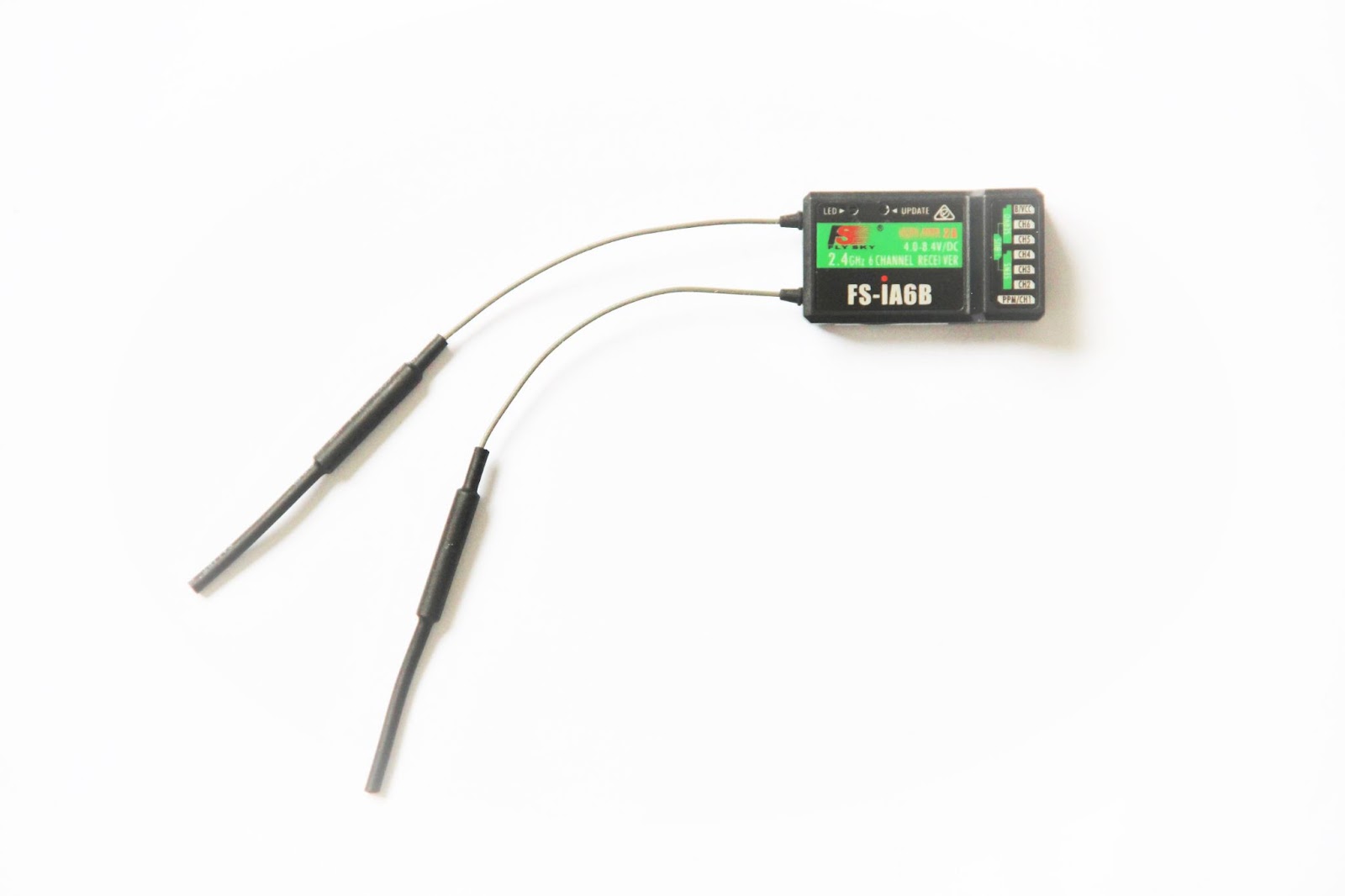
La radio recomendada es la FlySky FS-i6 con el módulo receptor FX-iA6B, pero es posible utilizar otras radios que trabajen en la frecuencia de 2.4GHz con al menos 5 canales, y que tengan un receptor con protocolo PPM. Esta radio, lamentablemente, no es de código abierto. Esperamos en algún momento poder encontrar alguna que lo sea.
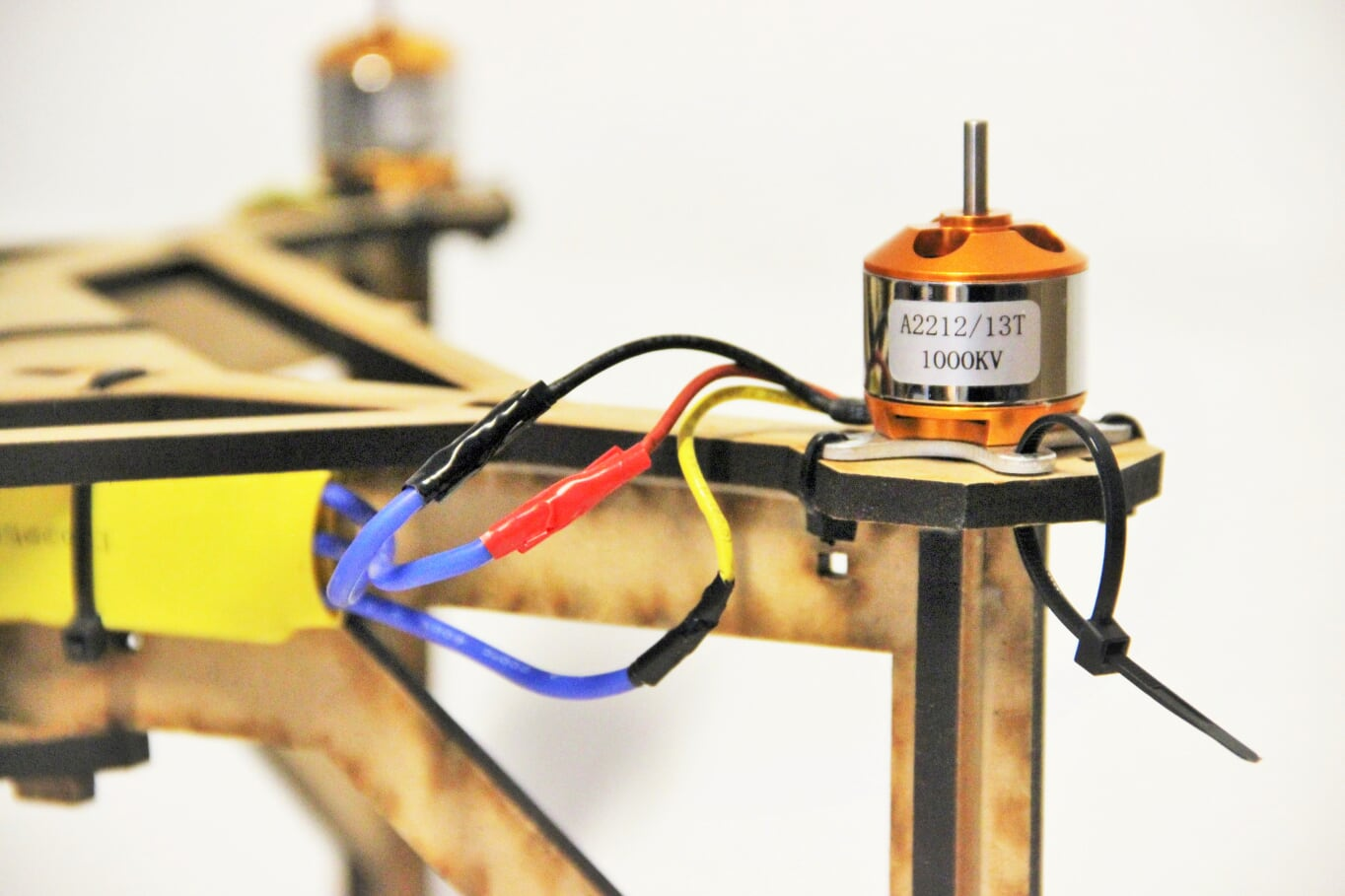
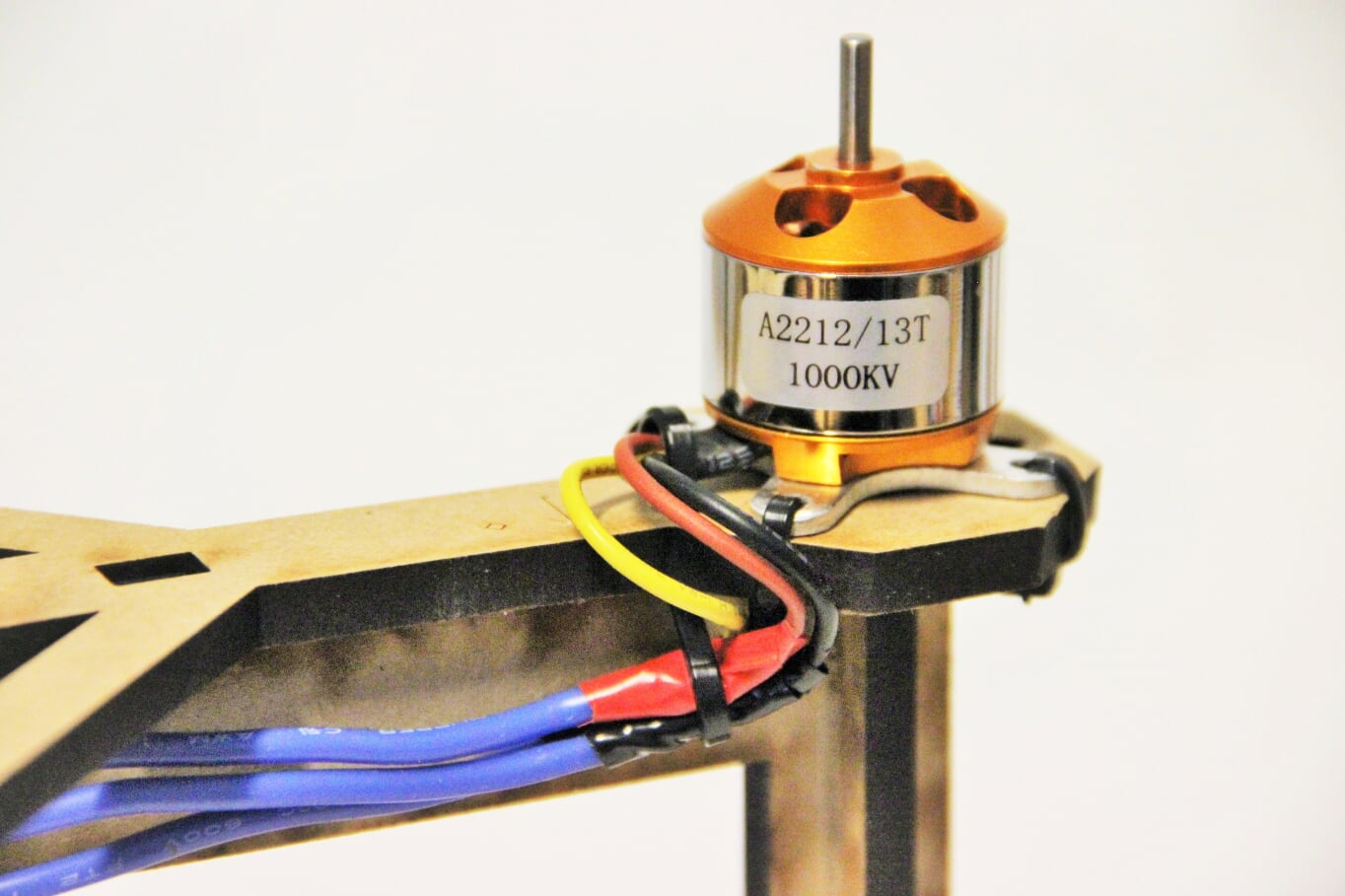
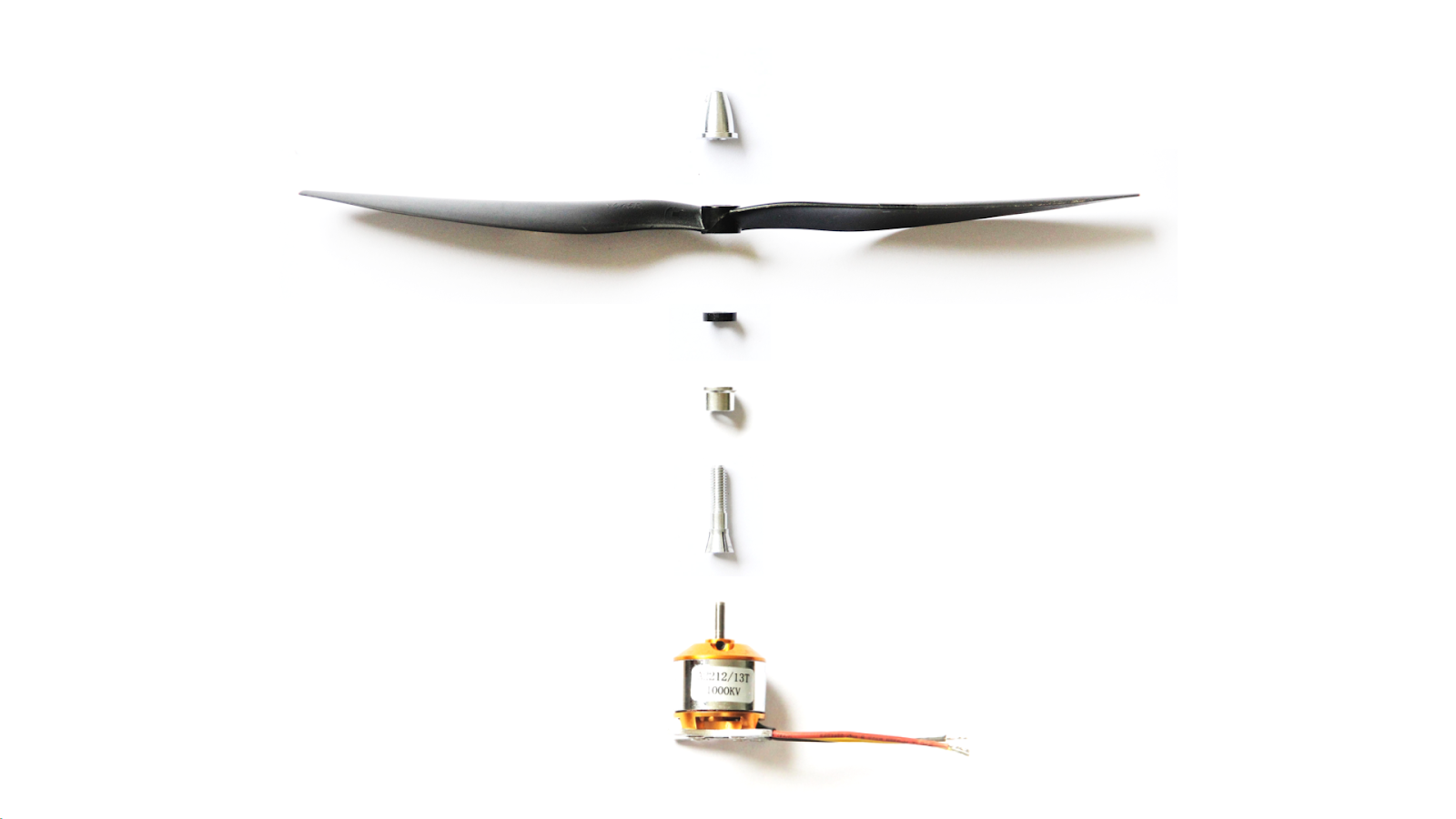
Motores A2212 1000KV (x 4) |
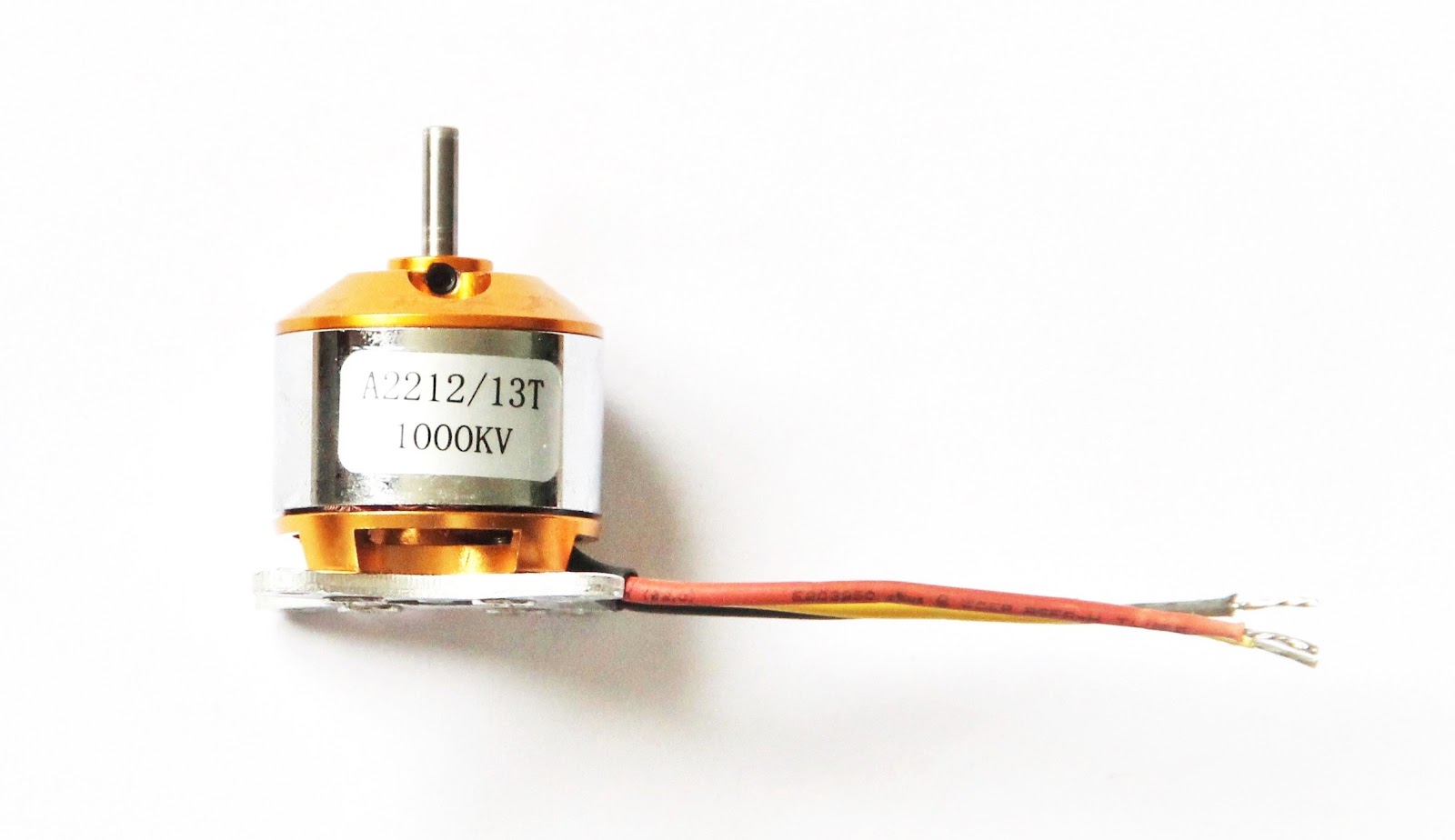
Existe una gran variedad de motores. Para multirotores se utilizan motores brushless (sin escobillas), porque deben girar muy rápido y no provocar ningún rozamiento. Para este dron utilizamos los motores A2212, de 1000KV. Los primero dos números (22) representan el diámetro en mm del estator (la parte fija en el medio del motor), mientras los otros dos números (12) representan la longitud en mm de los imanes que giran alrededor. Los KV (vueltas por minuto por voltio) es el número máximo de vueltas por minuto que el motor puede dar por cada voltio, por lo que este motor da 1000 revoluciones por minuto (rpm) cuando se aplica 1 voltio (sin resistencias ni hélices), 2000 rpm cuando se aplican 2 voltios, etc. Normalmente para cada motor se recomienda una batería con un número de celdas concreto, de esta manera definimos el voltaje máximo de trabajo. Estos motores trabajan con baterías de 3 celdas (‘3S’), con un voltaje máximo de 12,6 voltios.
Es usual que estos motores se vendan en un kit compuesto por 1 motor, 1 variador de velocidad, un par de hélices, y un portahélices.
Variadores de velocidad de 30A (x 4) |
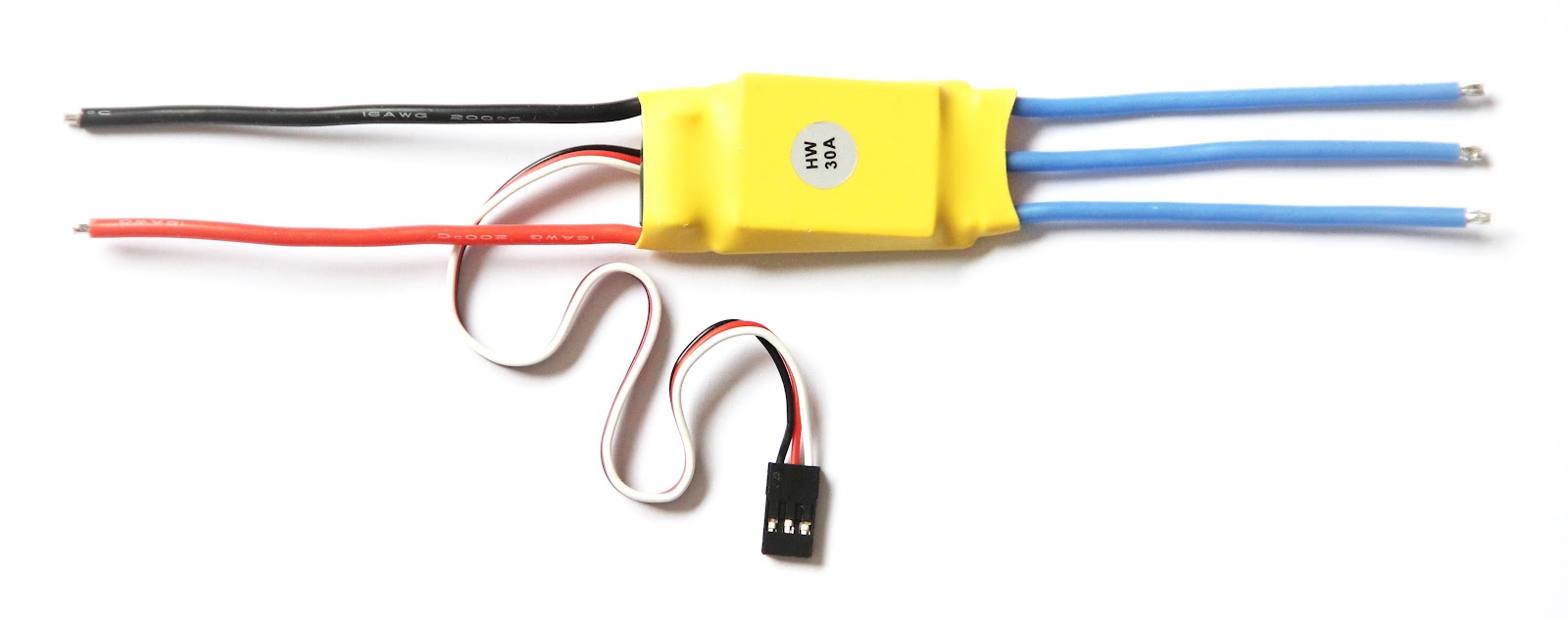
Los variadores electrónicos de velocidad o electronic speed controllers (ESC), son el circuito que conecta la batería, los motores y la placa de vuelo (también llamada tarjeta controladora). Las principales características de los ESC son su peso y su amperaje máximo. Así, los ESC de 30A pueden entregar esta cantidad de amperios de forma continua, y normalmente soportan picos de más corriente durante unos 10 segundos. Estos circuitos toman los (aproximadamente) 12 voltios de la batería y se los entregan a los motores de forma controlada y alternada entre los 3 cables del motor. La velocidad a la que el ESC alterna la polaridad en estos 3 cables regula la velocidad de giro del motor, y ésta está determinada por la señal que reciben de la placa de vuelo, a través del conector pequeño con 3 cables (blanco, rojo y negro). El ESC también entrega 5V (a través del cable rojo), lo cual en ciertos casos puede servir para alimentar la placa de vuelo. En el caso de la placa PixHawk que utiliza el OVLI esto no es así, por lo que conviene desconectar o cortar el cable rojo.
Hélices bipala 1045 (x4) |

Las hélices del OVLI flone son de 10 pulgadas y de 4,5 pulgadas de paso. Esto es, dando una vuelta completa avanzaría 4,5 pulgadas. Se pueden utilizar hélices de distinto color adelante y atrás para marcar cual es la parte delantera y trasera del multirotor. También puedes usar hélices del mismo color y utilizar otros elementos para marcar la orientación.
Portahélices de aluminio (x4) |

Estos permiten sujetar las hélices al eje del motor. En caso de no utilizar los que vienen en un kit junto a los motores y las hélices, se deberá prestar atención a que se ajusten a la medida del eje del motor y al orificio central de la hélice.
Batería Litio-Polímero de 3 celdas |

La batería recomendada para este dron es una batería de Litio-Polímero (‘LiPo’) de 3 celdas (‘3S’), con un voltaje máximo de 12,6 volts. Hemos probado baterías con una capacidad de entre 3000 y 5000 mAh (mili Amperes hora) con buenos resultados. Es importante saber no sólo la capacidad total de la batería, sino además a qué velocidad puede entregar esa corriente, lo que comúnmente se indica como un múltiplo de la capacidad. Por ejemplo, si la batería es de 3000 mAh con capacidad de descarga de 30 C, significa que podemos entregar 3000*30 = 90000 miliamperios = 90 amperios. Si el dron utiliza 4 ESC de 20 amperios, necesitamos baterías que puedan generar 80 amperios.
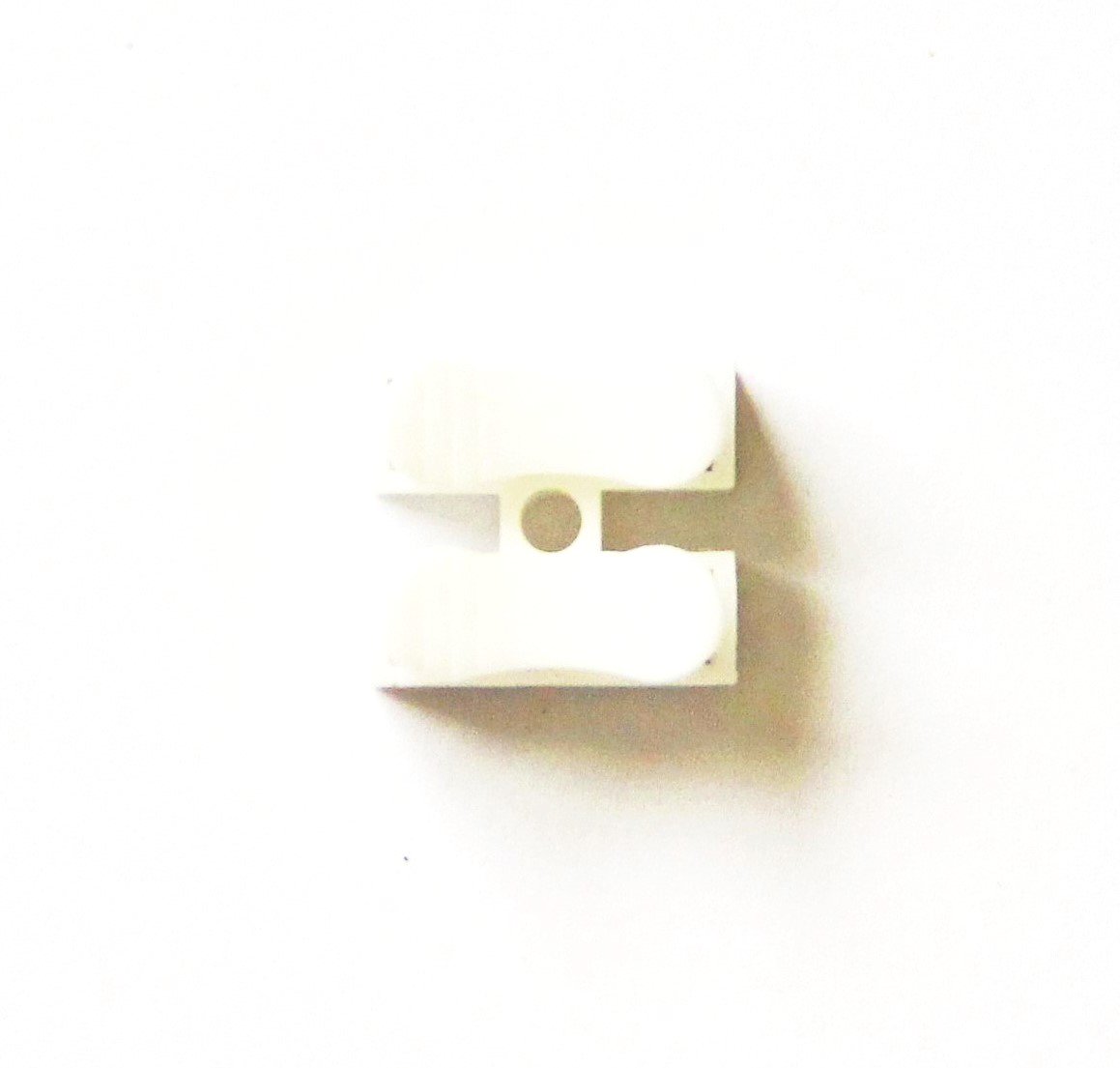
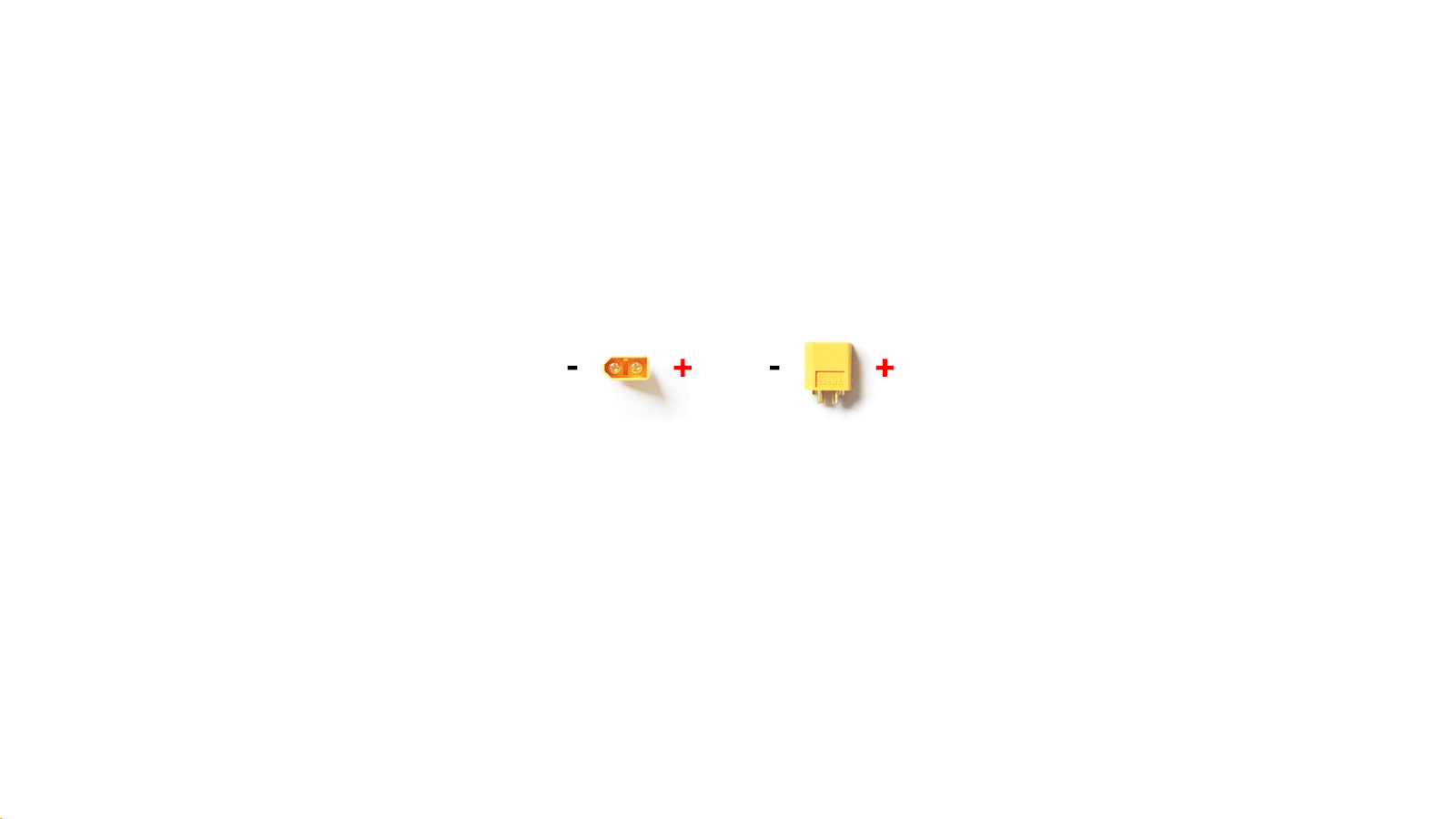
Conector XT60 macho |

Utilizaremos uno de estos conectores para poder conectar la batería.
Velcro para ajustar la batería |

Cargador balanceador |

Para cargar este tipo de baterías es necesario un cargador que permita cargar las 3 celdas a la vez de forma pareja, lo cual se conoce como cargador “balanceador”. Un cargador básico de este tipo es el B3 de Imax, mientras que un modelo más completo es el B6 de la misma marca, pero muchos otros sirven.
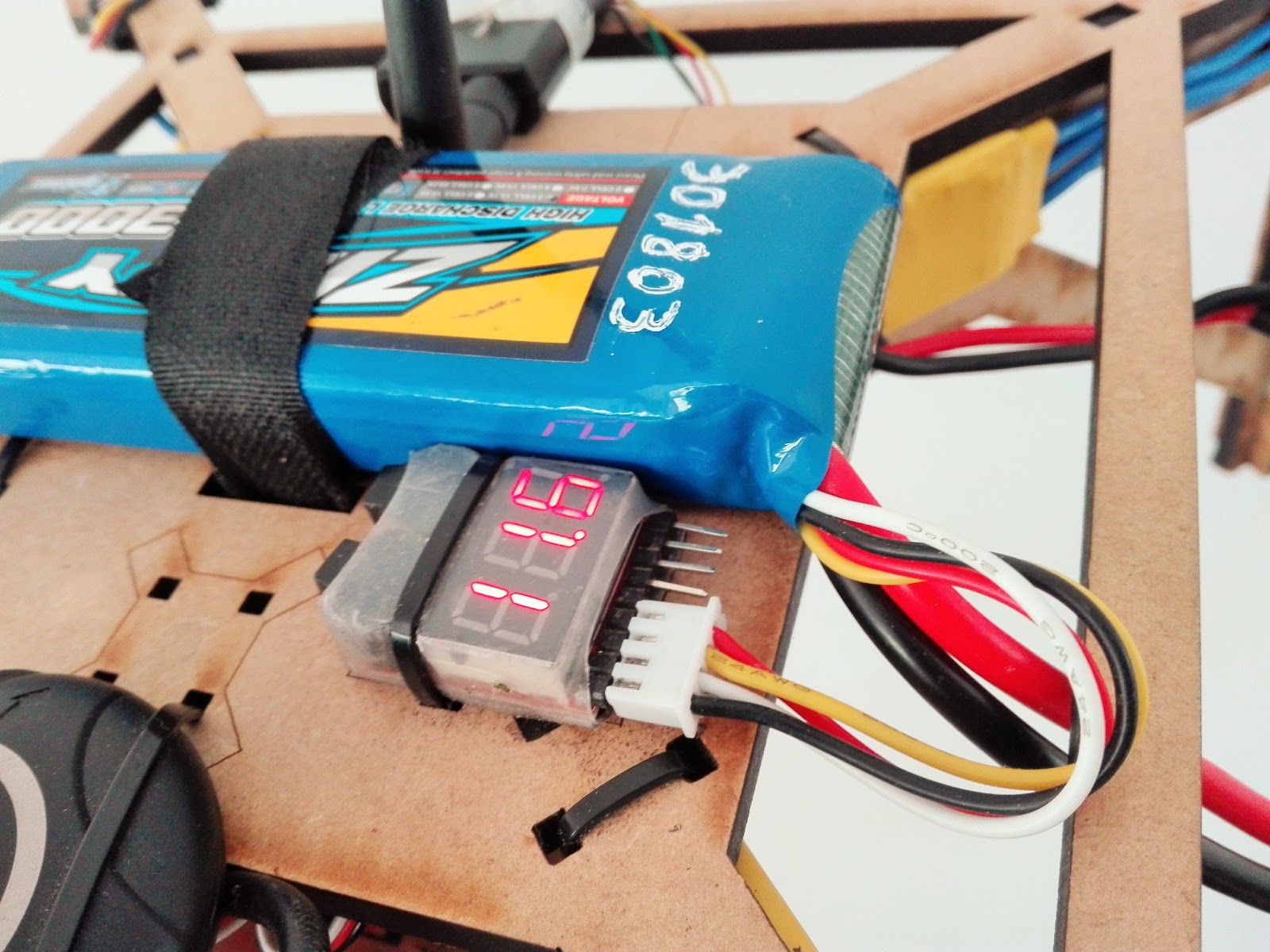
Alarma de bajo voltaje |
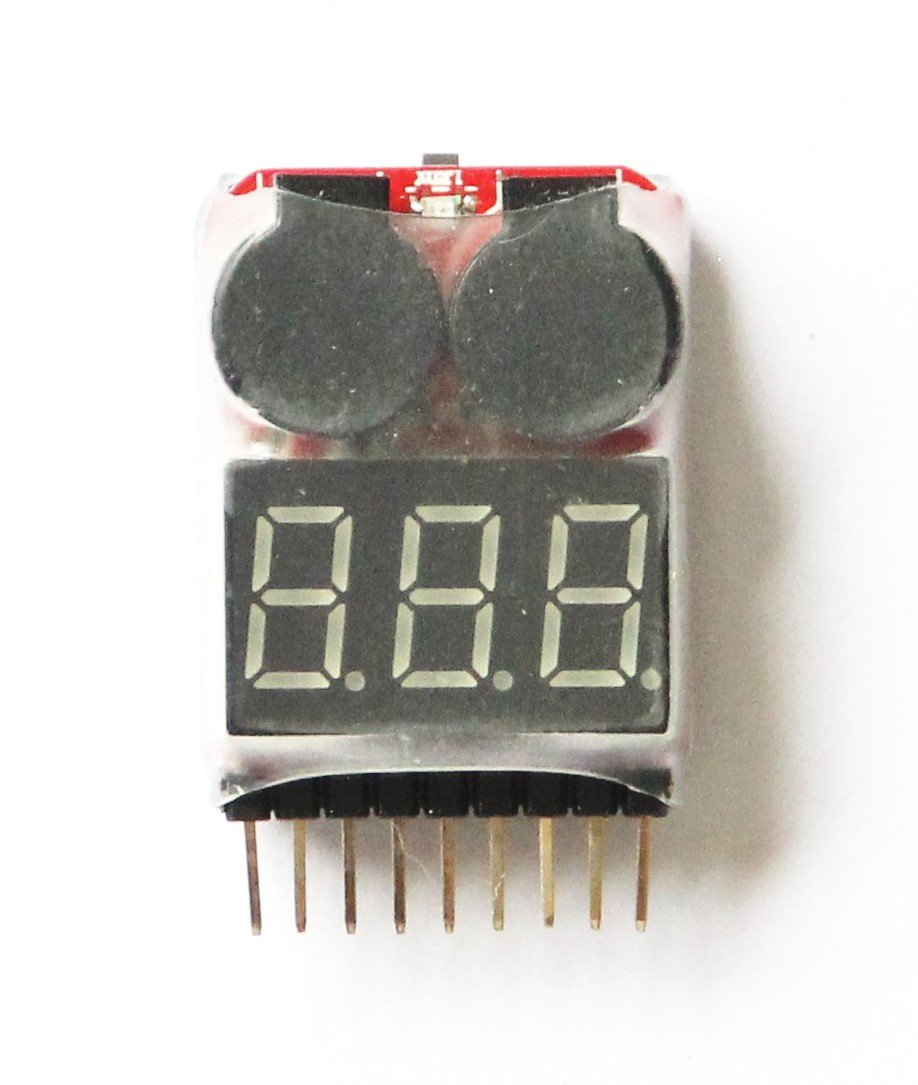
Utilizaremos una de estas alarmas de bajo voltaje, que se conecta al conector de 4 cables de la batería para tener una medición rápida y sencilla del voltaje, y también un aviso sonoro en caso de que el voltaje sea muy bajo durante el vuelo.
Cámara |

Nosotros utilizamos la cámara Canon ELPH100HS o la ELPH180, debido a su bajo peso y precio, la calidad de la imagen, y a la posibilidad de instalarle el software CHDK para controlar sus funciones. Otros modelos también pueden cumplir con ese objetivo.
Banditas elásticas y esponja de cocina |

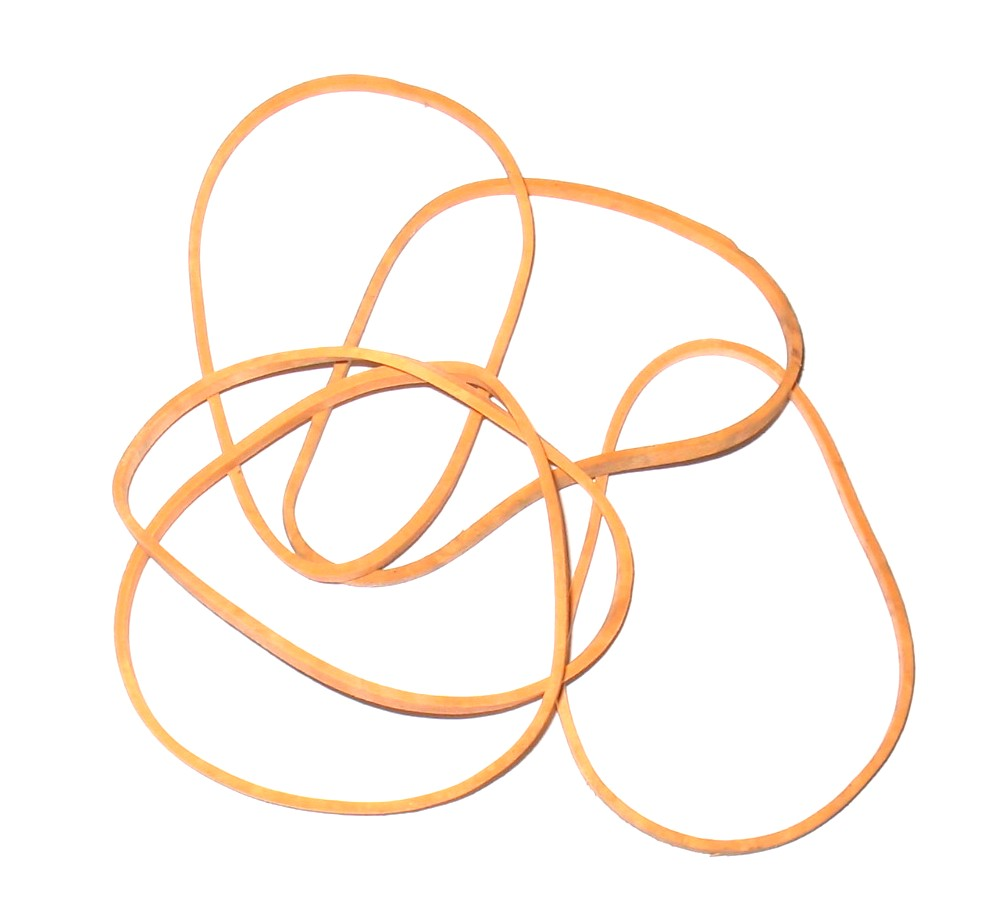
Se utilizan para fijar la cámara al dron, amortiguando las vibraciones de los motores, y evitando así que las fotos salgan movidas.
En este documento hay sugerencias de dónde conseguir todos estos componentes |
Herramientas para la construcción
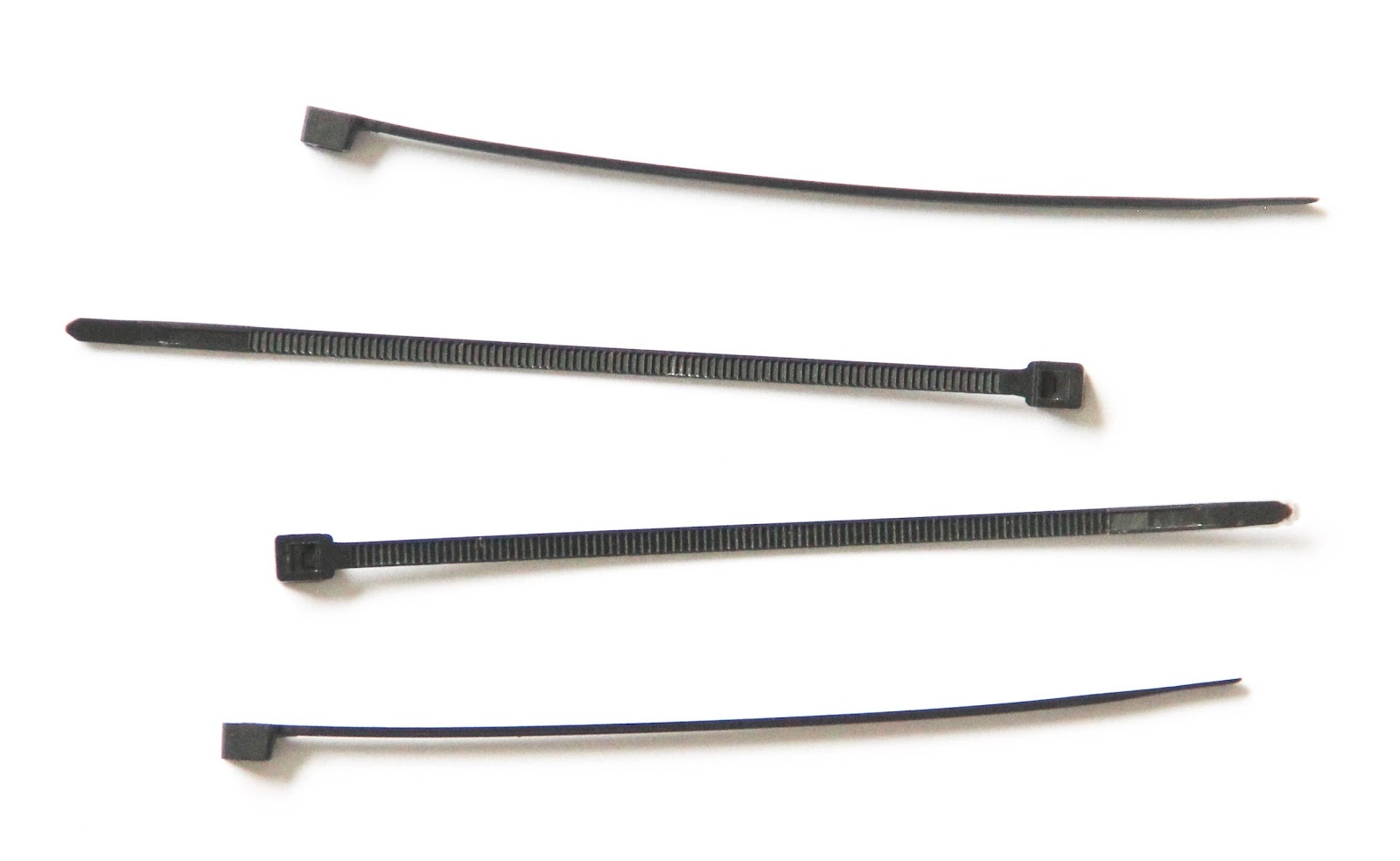
Precintos/bridas/abrazaderas/sujetacables | Pegamento para madera y cianoacrilato de metilo |

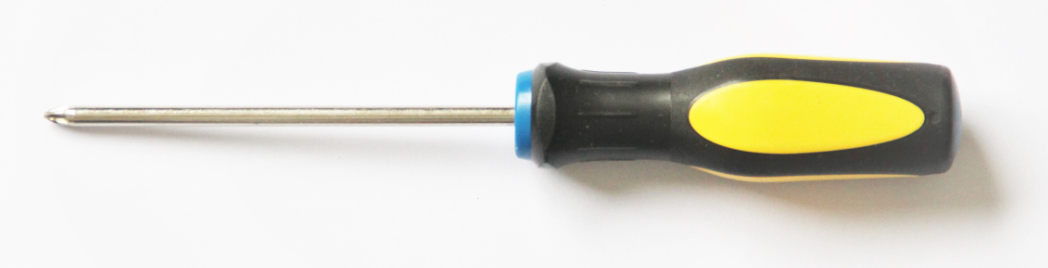
Pinza, alicate, tijeras | Destornillador phillips y llave allen |


Soldador o cautín | Estaño y soporte para soldar (o “tercera mano”) |


Medidor de voltaje o “tester | Barbijo N95 y gafas de seguridad |
Cinta aisladora o termocontraíble | Cinta de papel / cinta de enmascarar / cinta de pintor |
Balanceador de hélices |
Paso 1: Armado de la estructura
El archivo con la última versión de la estructura del dron puede ser encontrado aquí: https://github.com/vuelaendron/vuela/tree/master/estructura |
La estructura del dron se puede fabricar utilizando una pieza de madera terciada o multilaminada (distintas capas de madera unidas con pegamento), o con otros materiales como MDF (más barato y fácil de conseguir, pero menos resistente).
Dependiendo del país, conseguir esta madera y el corte láser puede ser más o menos difícil. La calidad de la madera también varía de lugar en lugar. Lo importante es fijarse en lo siguiente: a) que la madera sea totalmente plana, es decir que no tenga ninguna curvatura, b) que no tenga huecos o partes que hayan sido cubiertas con pasta de madera. Recomendamos que la madera sea de 5mm de espesor.
El corte se puede hacer con una máquina cortadora láser, que corta la pieza de madera automáticamente siguiendo un diseño realizado por computadora. En ciudades medianas o grandes pueden existir empresas que ofrecen el servicio de corte láser (usualmente ellos ponen la madera). En nuestra experiencia en Chile y Argentina ha sido difícil encontrar empresas de corte láser que trabajen con madera terciada. El MDF por otro lado, es muy común. Luego de recibir el corte, se deben separar las distintas piezas necesarias para construir la estructura del dron y comenzar a armar.
Para pegar la estructura recomendamos usar cola blanca de carpintería, que es barata y fácil de conseguir. Si tienes un accidente y la estructura se quiebra, se puede reparar fácilmente pegándola de nuevo.
Foto 2:
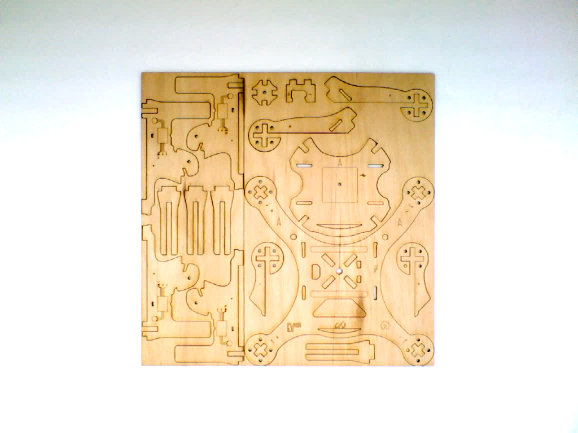
Foto 3:
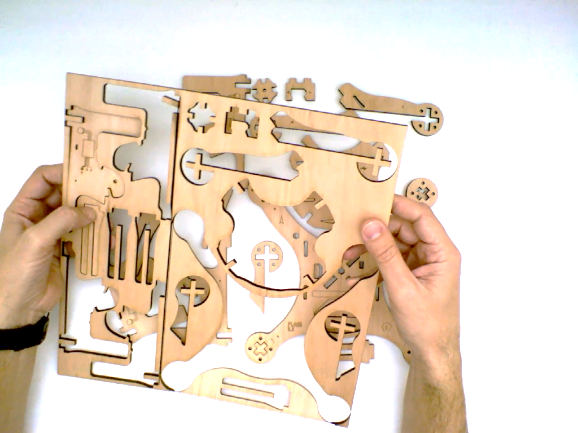
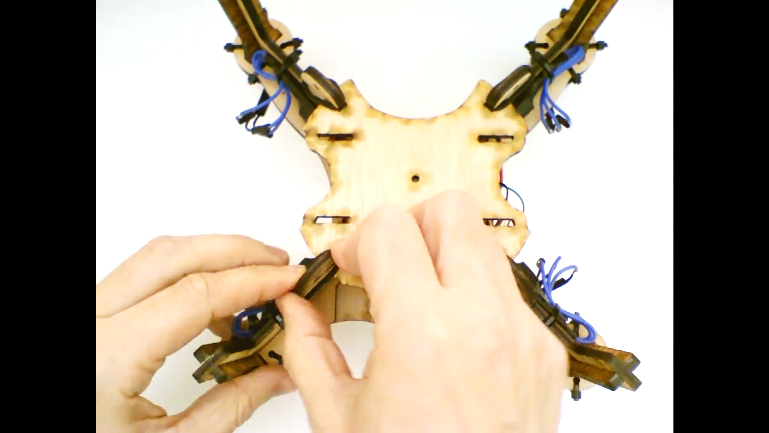
Para armar la estructura del dron deberemos guiarnos por el siguiente esquema o por este video: https://www.youtube.com/watch?v=ufA7nfWCm0I (corresponde a la versión anterior -el Flone- pero el armado es similar).

Todas las piezas (excepto la última) deben ser unidas cuidadosamente utilizando pegamento para madera. Es importante que las inscripciones en la madera queden hacia arriba (hacia abajo al momento de pegar las partes como en el esquema) para usarlas como referencia.

La última pieza central (paso 3 en el esquema) no hay que unirla con pegamento, ya que va sostenida con bandas elásticas (para poder abrirla fácilmente e instalar o desinstalar alguno de los componentes electrónicos). Igualmente conviene colocarla mientras se seca el pegamento de las demás partes, para que la estructura no quede deformada.
Paso 2: Instalación del firmware de la placa controladora
Antes de comenzar a utilizar la placa controladora PixHawk, es necesario cargarle el software (específicamente, un tipo de software llamado ‘firmware’) que correrá en la placa durante el vuelo. El firmware de código abierto que utilizaremos se llama ‘ArduPilot’, y para cargar este firmware en la placa controladora, y para luego configurarlo, utilizaremos un programa controlador de vuelo llamado ‘Mission Planner’.
Las instrucciones para instalar el Mission Planner y el firmware ArduPilot están en la sección “Instalación de los componentes de software” de esta Guía.
Paso 3: Conexión de variadores de velocidad y motores
Los componentes necesarios para este paso son: una batería, la placa controladora PixHawk, los 4 motores, los 4 variadores de velocidad (ESC) y el conector XT60. La conexión entre los componentes se hace mediante soldadura de estaño, para que sea permanente y segura. Además de los componentes mencionados, utilizaremos estaño, un soldador eléctrico y, dependiendo de la longitud de los cables de los ESCs, podremos necesitar además un poco de cable grueso (preferentemente de colores rojo y negro).

En este link se puede descargar la guía ilustrada “Soldar es fácil”: http://mightyohm.com/files/soldercomic/translations/fullsoldercomic_spanish1.pdf |
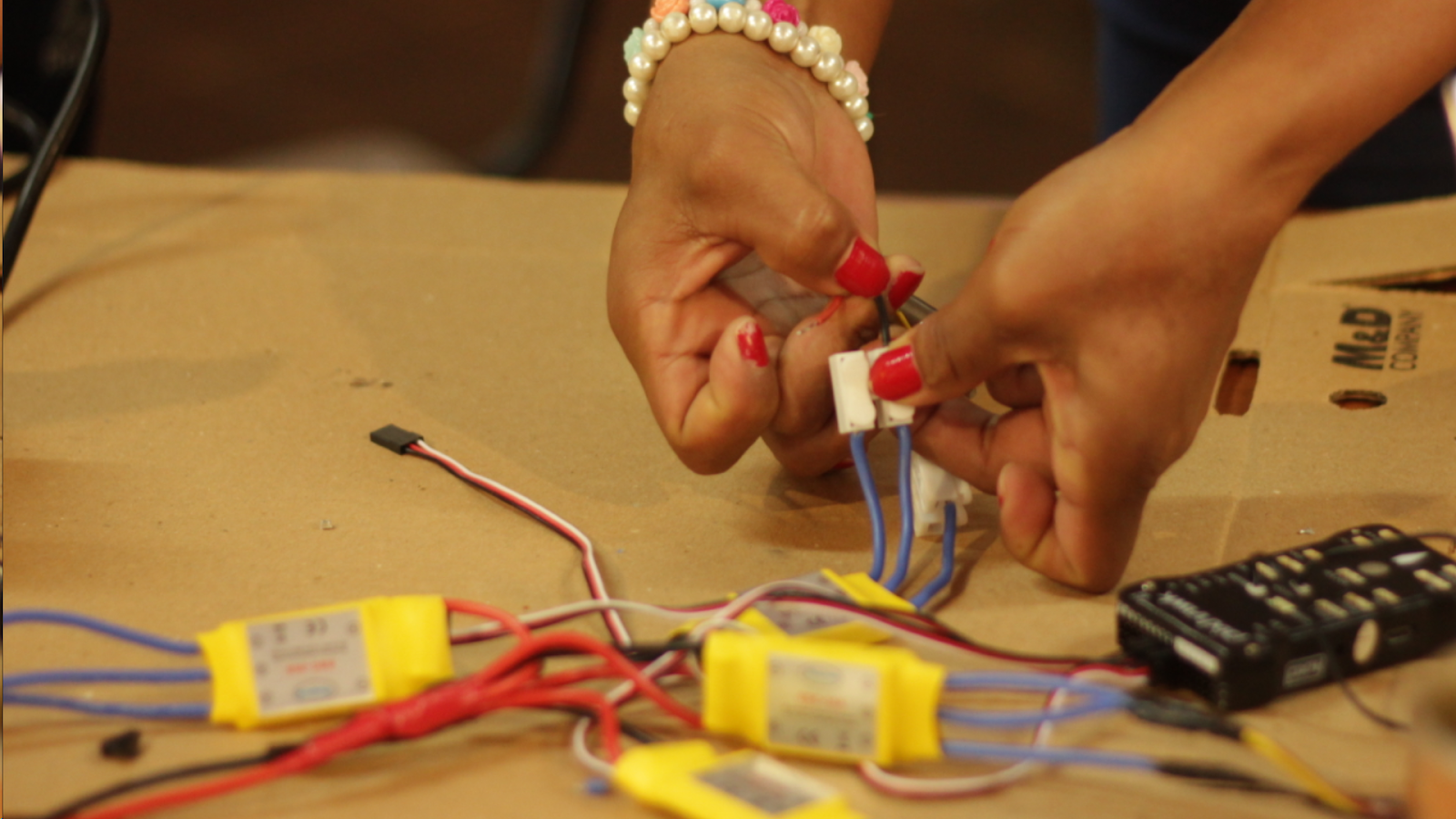
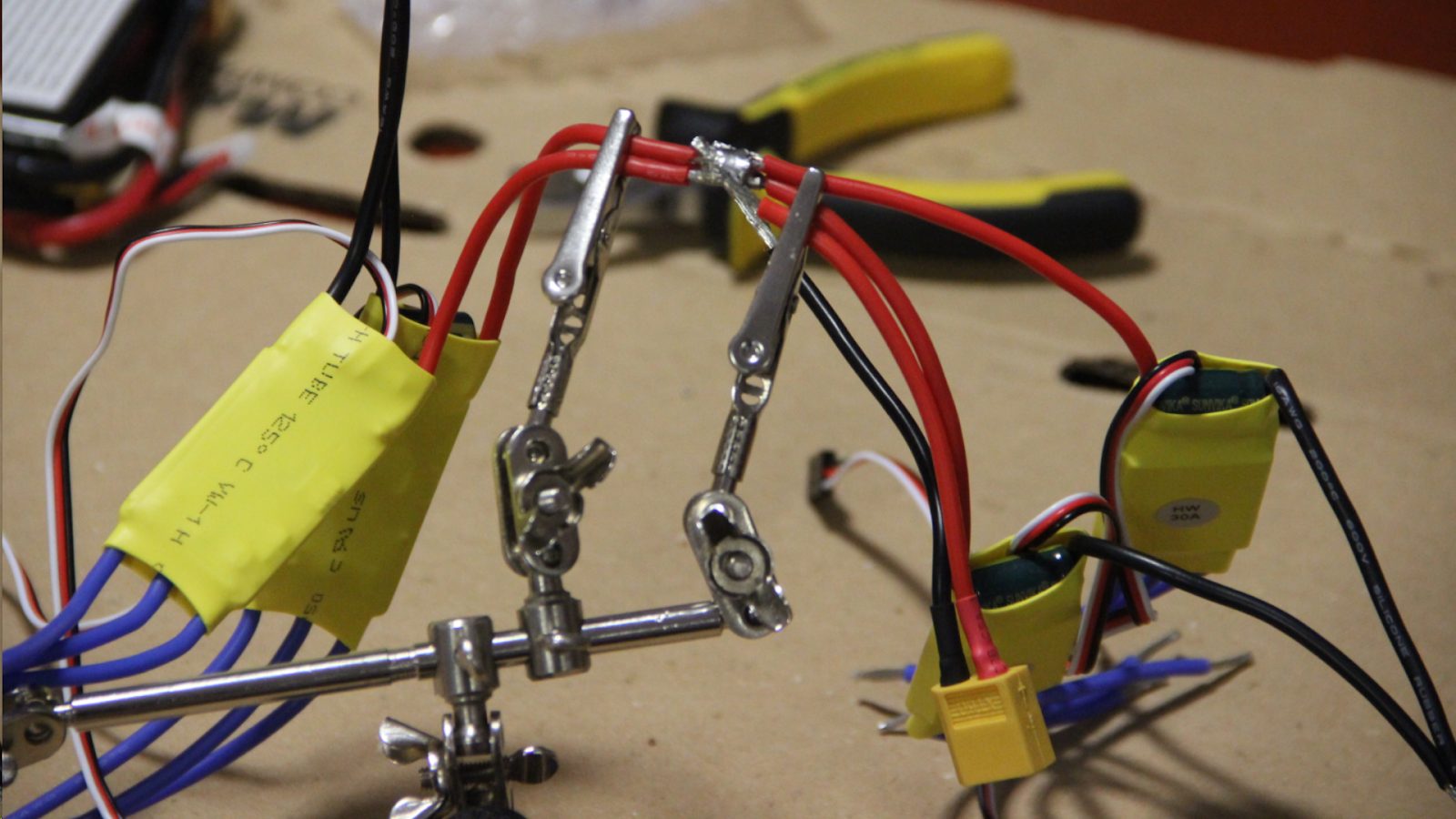
Nota: antes de conectar de forma permanente los componentes del dron (mediante soldadura de estaño), es posible probar su correcto funcionamiento utilizando algún tipo de conexión no permanente, utilizando por ejemplo borneras (también llamadas regletas, clemas o fichas de empalme), o cables puente con fichas cocodrilo (también llamados ‘perritos’).
|
Los variadores de velocidad toman la corriente eléctrica de la batería y la llevan a los motores, controlando su velocidad según las órdenes que reciben desde la placa controladora de vuelo. Cada variador de velocidad tiene 8 cables: de un lado hay 2 cables de entrada, uno de color rojo (positivo) y uno negro (negativo), 3 cables delgados con un conector incorporado (para ser conectados a la placa controladora) y del otro lado 3 cables de salida de un mismo color (que serán conectados a los motores). El siguiente esquema muestra cómo es la conexión completa de un ESC:
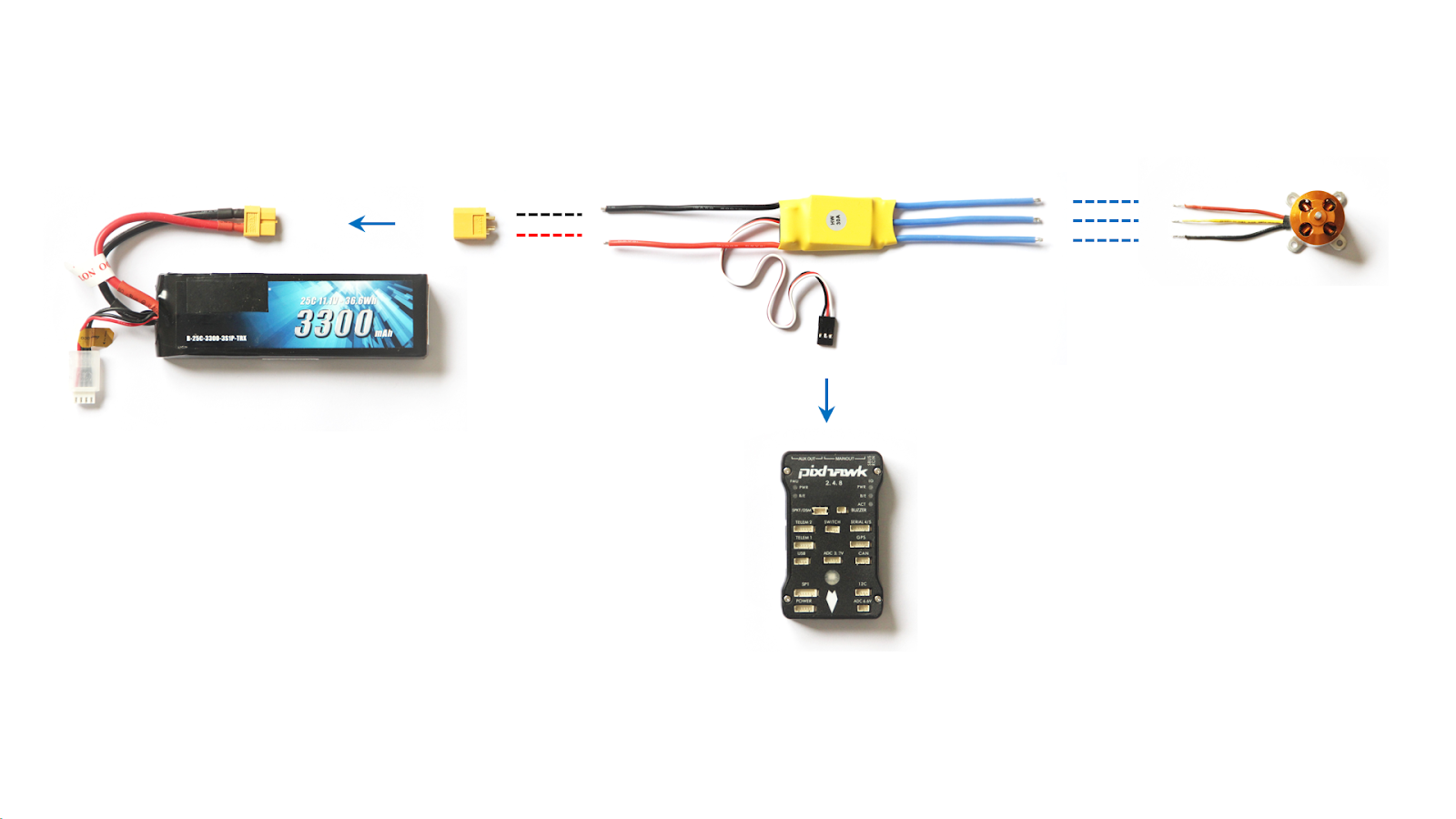
- - - Soldaduras
→ Conectores
Conexión de los variadores
Primero deberemos conectar los cables de entrada (cables rojo y negro) de los 4 variadores de velocidad al conector XT60, como se muestra en este esquema:
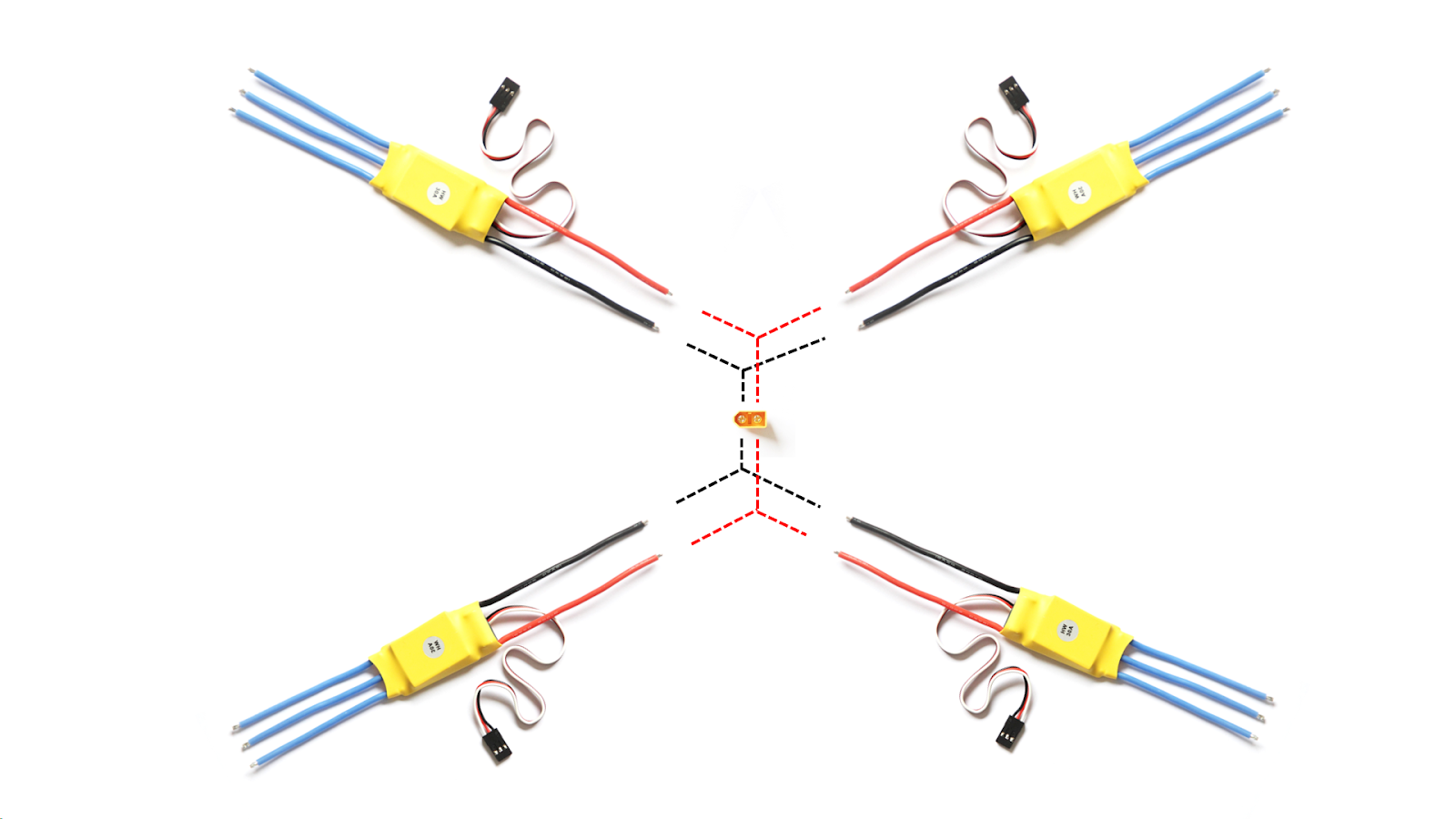
Soldaremos todos los cables negros al pin negativo (del lado redondo o en punta) del conector XT60, y todos los cables rojos al pin positivo (del lado recto del conector). Luego de soldar cada cable, deberemos cubrirlo con cinta aisladora o con termocontraíble.

NOTA DE SEGURIDAD: Es importante respetar la polaridad, conectando positivo con positivo y negativo con negativo, para evitar quemar el variador (el lado recto de la ficha XT60 es el positivo y el lado ‘en punta’ o redondo es el negativo). |
Conexión de los motores
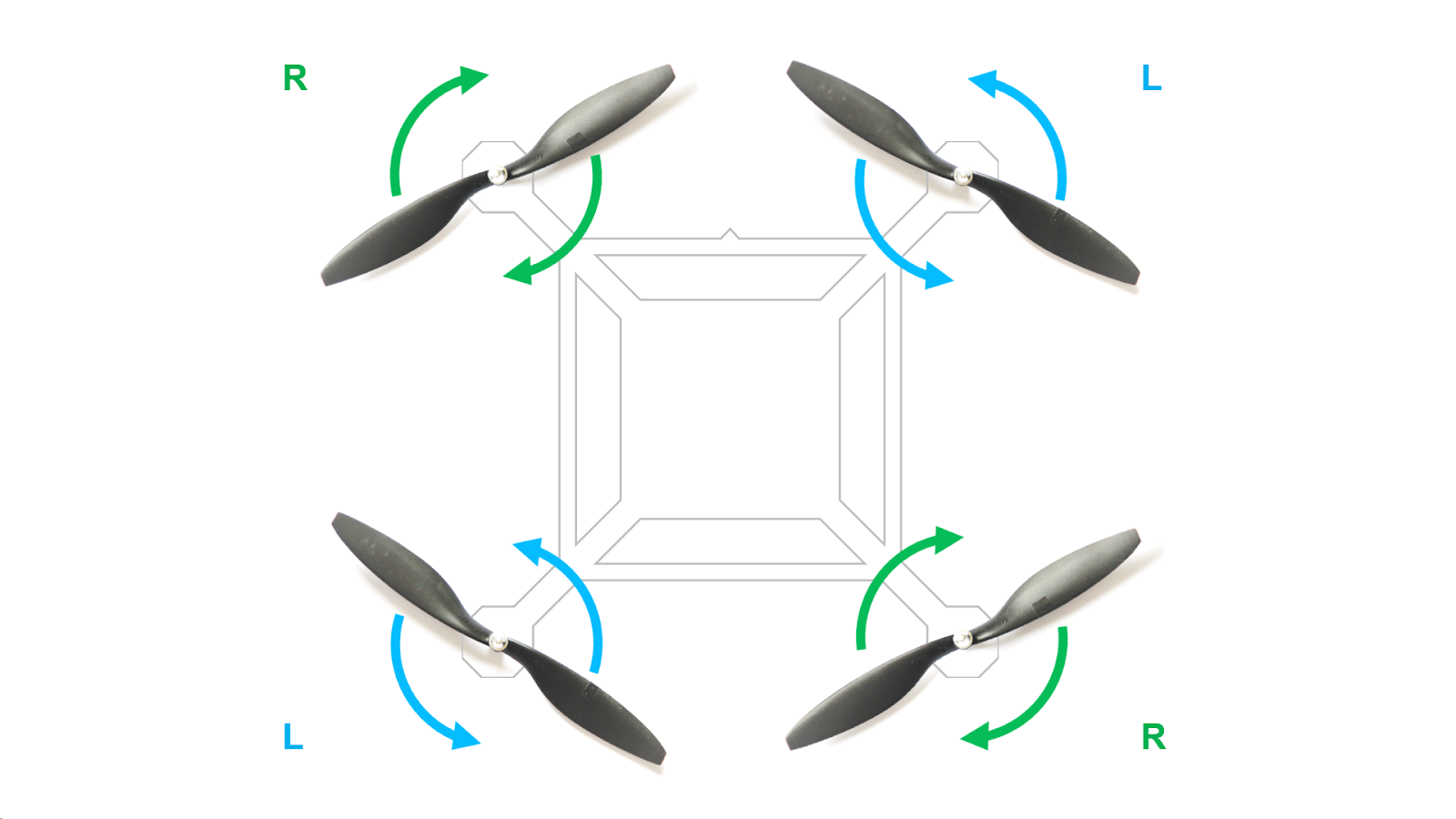
Luego soldaremos los 3 cables de salida de los ESC a los 3 cables de cada motor. La forma en que conectaremos los cables va a definir el sentido de giro de los motores (sentido horario o antihorario). El sentido de giro de los motores se puede invertir ‘cruzando’ la conexión de 2 de los 3 cables, como se muestra en esta figura:

Los motores deberán estar conectados de forma tal de que 2 motores giren en un sentido y 2 en otro. La forma de lograr esto es guiándonos por las indicaciones de los cables de salida (por ejemplo si están indicados con letras A, B y C) o por su posición y por los colores de los cables de los motores.
Prueba de motores
NOTA DE SEGURIDAD: Antes de conectar la batería, hay que asegurarse que todas las conexiones fueron hechas correctamente y las soldaduras están firmes y bien aisladas (si dos cables se tocan mientras pruebas los motores podrían quemar el variador de velocidad u otros componentes). |
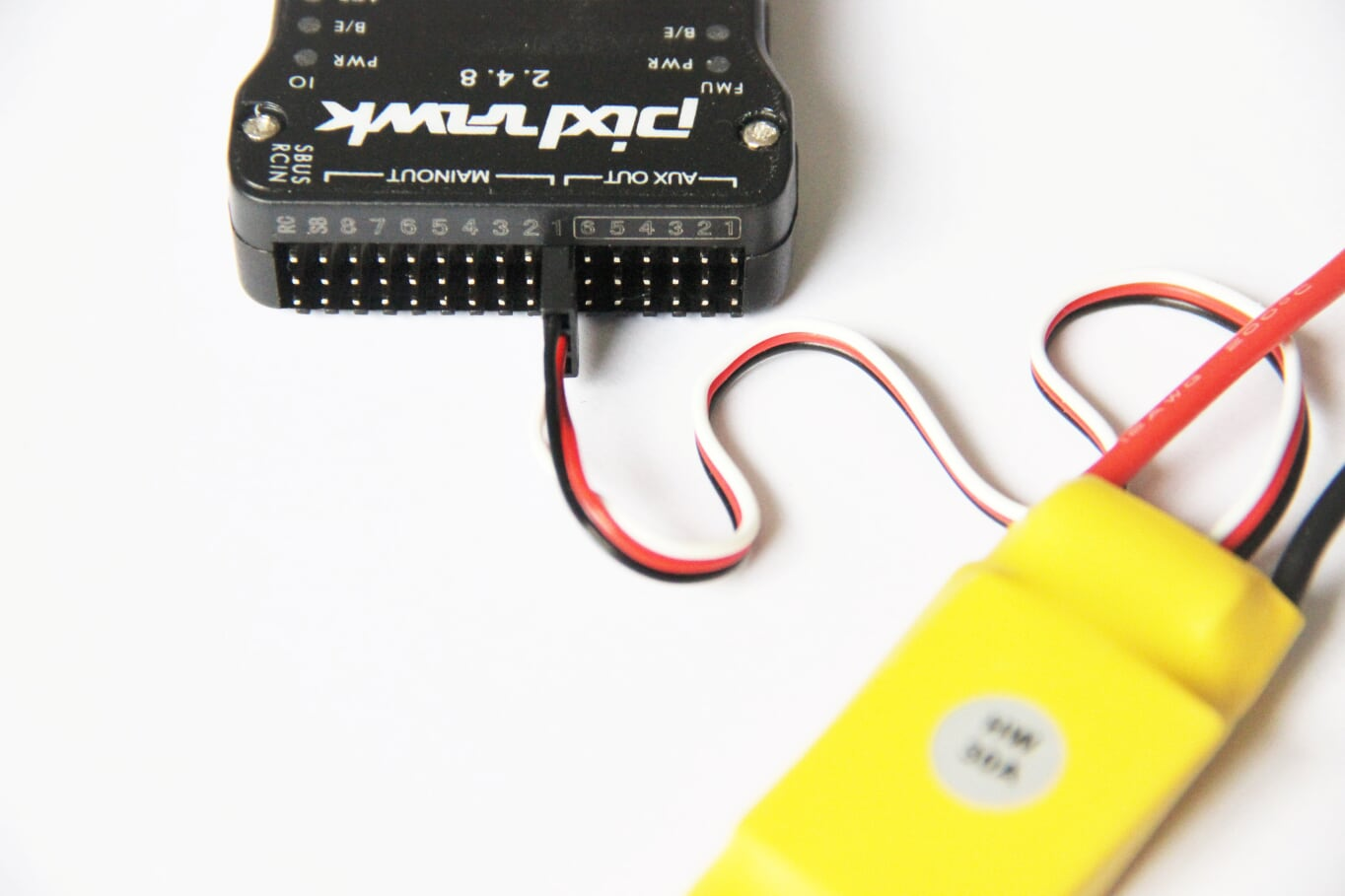
El cable triple pequeño que sale de cada uno de los variadores de velocidad va conectado a la placa controladora, en donde dice ‘MAIN OUT’, en los números 1 a 4. El conector debe colocarse de forma tal que el cable negro (o marrón) quede hacia arriba y el cable blanco (o amarillo) hacia abajo. El cable rojo (a través del cual el ESC envía 5 volts de corriente) no hace falta y debe desconectarse o cortarse.
Foto XX
Luego conectaremos la batería al conector XT60. Es importante verificar previamente que las conexiones sean correctas, y de evitar cortocircuitos colocando cinta aislante si hay conexiones que puedan llegar a tocarse. Si todo está conectado correctamente, al conectar la batería, se escuchará una melodía generada por los ESC a través de los motores. Si algo no está conectado correctamente no se escuchará nada, o se escuchará la melodía incompleta.
Luego conectaremos la placa Pixhawk a la computadora mediante el cable USB, abriremos el Mission Planner y haremos clic en ‘CONNECT’. En la pestaña ‘INITIAL SETUP’, dentro de ‘Optional hardware’, haremos clic en ‘Motor test’.
Para probar el funcionamiento de los variadores y sus motores, haremos clic en los botones ‘Motor A’, ‘Motor B’, ‘Motor C’ y ‘Motor D’. Como todavía los variadores de velocidad no están ‘calibrados’ (es un paso que se realiza más adelante), el valor de aceleración (‘Throttle %’) necesario para que los motores giren probablemente sea alto (entre 25 y 35%) y también puede que no sea igual para los distintos motores.

Paso 4: Colocación de los componentes en la estructura
Primeramente, deberemos decidir la numeración de los motores. De acuerdo al sentido de giro de cada uno (que registramos al probarlos), podremos asignarles el número 3 o 4 a los que giran en sentido horario y los número 1 o 2 a los que giran en sentido antihorario. Los variadores y motores irán luego colocados en el brazo correspondiente a su numeración, que está indicada en la estructura.
Colocaremos primero los variadores en cada uno de los brazos uniéndolos a la estructura con precintos (también llamados sujetacables, bridas o cinchas).

Luego colocamos los 4 motores, también utilizando precintos. Previamente, hay que colocarle las bases con los 4 tornillos, asegurándolos con algún tipo de pegamento (por ejemplo ‘La Gotita’, o también con esmalte de uñas, que permite luego sacar el tornillo).

La placa controladora la pegaremos con cinta adhesiva doble faz a la pieza suelta de la estructura del dron. También pegaremos ahí el receptor del radiocontrol y el parlante.

Luego conectaremos los 4 ESC a la placa controladora. Deberemos prestar atención de conectar los ESC en orden, siguiendo la numeración. Cada conector debe colocarse de forma tal que el cable marrón (o negro) quede hacia arriba y el cable amarillo (o blanco) hacia abajo de la placa controladora.
Luego conectaremos el receptor de la radio a la placa controladora. En el caso de utilizar el receptor FS-iA6B (u otro con conexión por PPM) tendremos que hacer la conexión mediante 3 cables: negativo, positivo (para alimentar el receptor desde la placa controladora) y señal (a través del cual se transmiten los valores de todos los canales de la radio). Para esta conexión deberemos utilizar un ‘cable para servo’ o 3 cables puente (también llamados cables jumper o cables dupont) hembra-hembra. El receptor tiene varias filas de 3 pines (una fila para cada uno de los canales de transmisión), de los cuales utilizaremos solo la fila correspondiente al canal 1 (indicada como PPM/CH1). En el caso del receptor FS-iA6B, el pin de abajo es el negativo, el pin central el positivo y el pin de arriba el de señal. Estos deberán ser conectados a los primeros 3 pines de la placa controladora ubicados en el lado izquierdo, indicado como ‘RC IN’.

Por último, colocaremos la pieza móvil de la estructura en su posición, sujetándola con 4 bandas elásticas.
gps
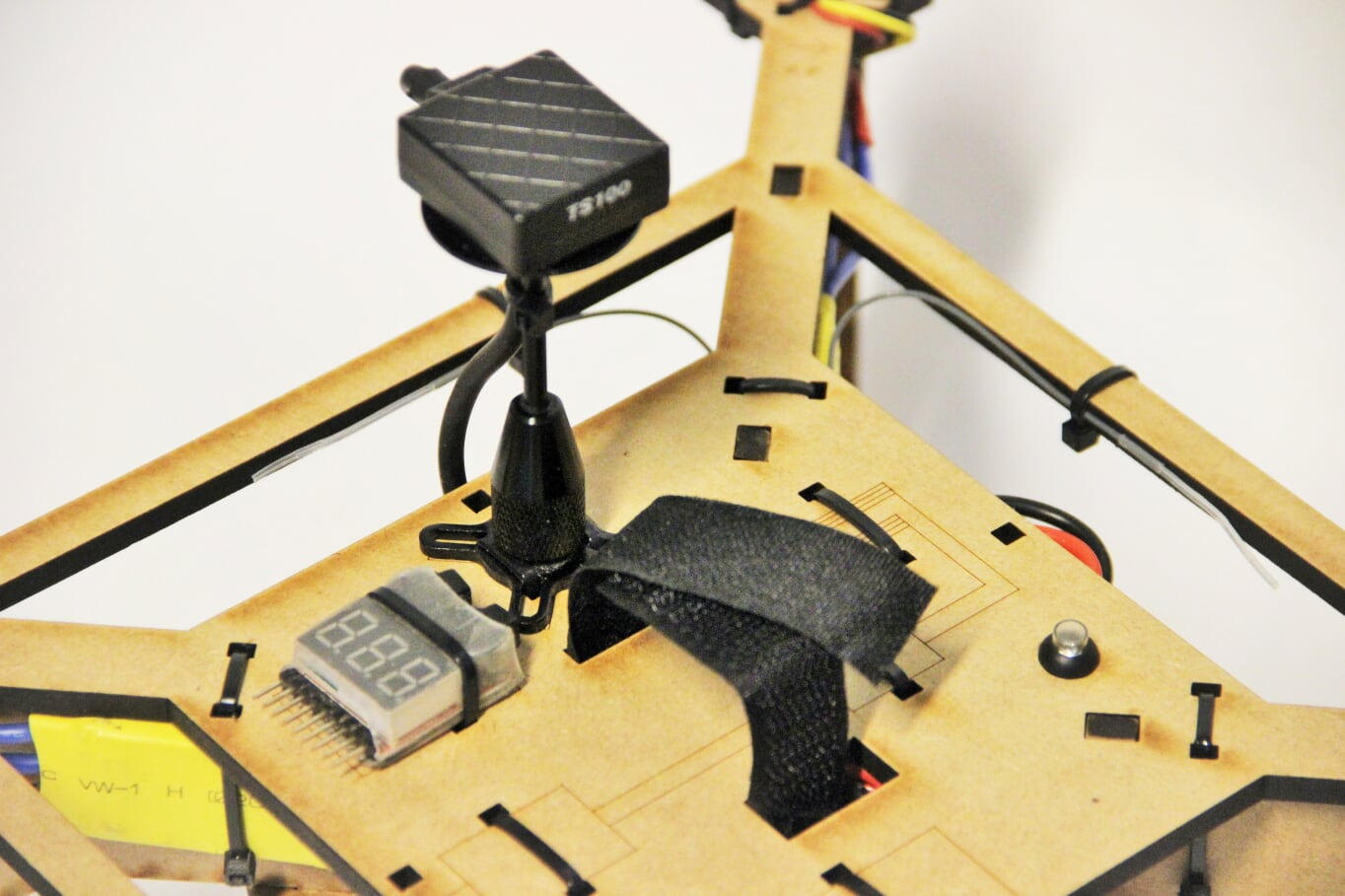
telemetría
receptor
botón
parlante
batería (para poder usar la telemetría en el paso posterior)
alarma de batería
Colocación de la cámara en el OVLI
La cámara irá en la parte de abajo del dron (ver foto XX). La cámara será sujetada con bandas elásticas para evitar el traspaso de vibraciones (el velcro transmite vibraciones). Entre la estructura y la cámara irá una esponja de lavar (ver foto XX) cuyo fin es aislar las vibraciones que provienen de los motores.
Un consejo es que la cámara (o teléfono con cámara) que se use sea de un color brillante y llamativo, para que en caso de accidente y la cámara salga expulsada del dron, ésta pueda ser encontrada más fácilmente (si es negra será más difícil encontrarla).
Paso 5: Configuración
La configuración de la placa controladora la realizaremos conectándola a la computadora mediante USB y utilizando el programa Mission Planner. En la pestaña ‘INITIAL SETUP’, continuaremos con las configuraciones obligatorias listadas en ‘Mandatory Hardware’ (y además una que está en ‘Optional Hardware’). Estas incluyen:
- Conexión a través de los módulos de telemetría
- Calibración de acelerómetros
- Calibración de brújulas
- Calibración de ESCs
- Calibración del radiocontrol
- Selección de modos de vuelo
- Calibración de medidor de voltaje
- Configuración de Failsafe
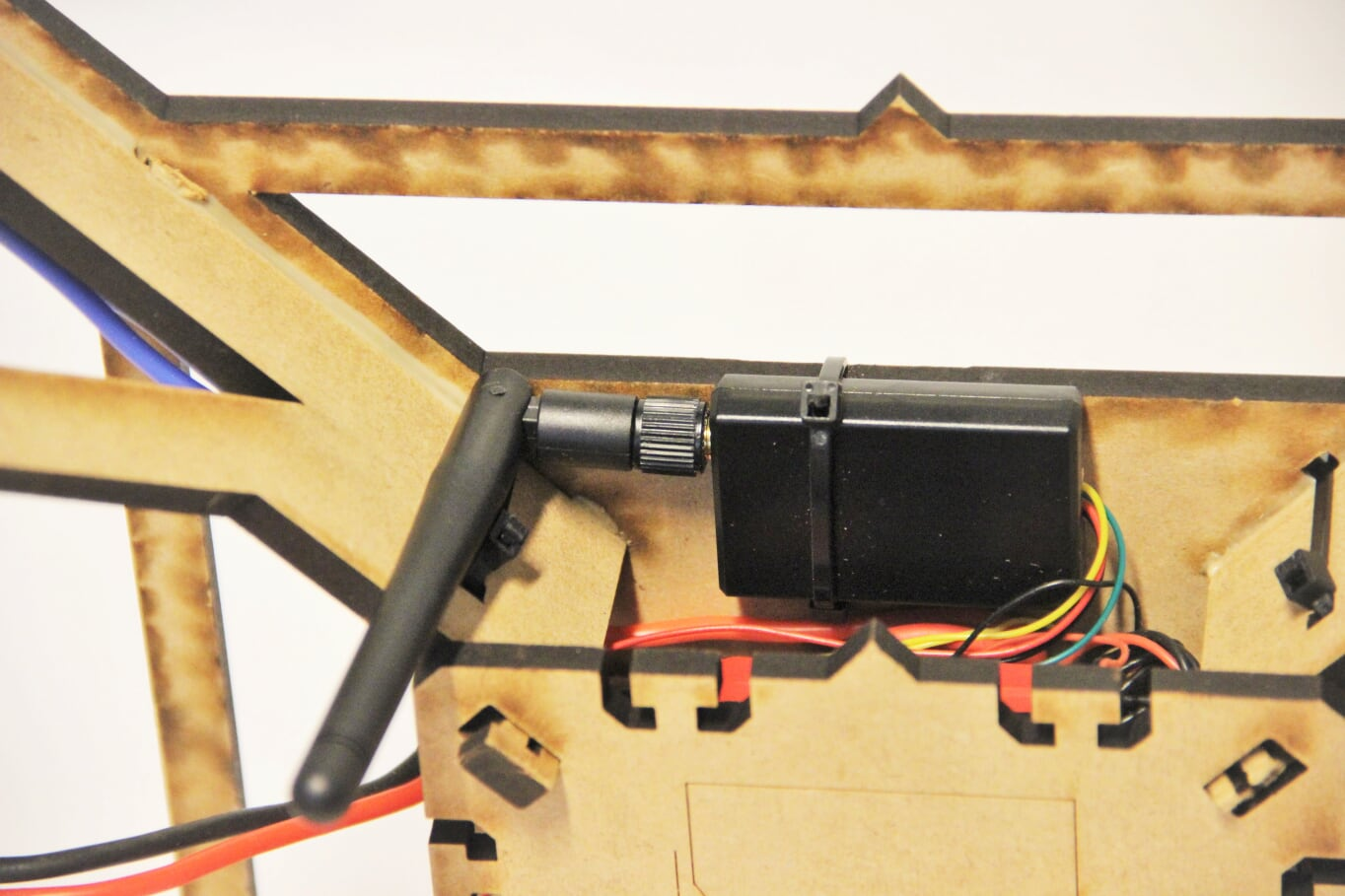
Conexión a través de los módulos de telemetría
Los módulos de telemetría permiten conectar la placa controladora a la computadora mediante un enlace de radio, reemplazando el cable USB. Esto permite tener una conexión al Mission Planner mientras el dron está en vuelo, y además nos permitirá realizar mejor y más cómodas las calibraciones. Uno de los módulos está ya montado en el dron, mientras que el otro lo conectaremos a uno de los puertos USB de la computadora en la cual hayamos instalado el Mission Planner. En ciertas computadoras no se reconoce inmediatamente el módulo de telemetría, y es necesario instalar un controlador o ‘driver’ (el mismo que suele ser necesario para conectar la placa Pixhawk por USB - ver link e instrucciones en la sección “Instalación de los componentes de software” de esta Guía).
Una vez instalado el módulo de telemetría en el puerto USB, y abierto el programa Mission Planner, deberá aparecer disponible un puerto “COM” en la lista desplegable junto al botón de “Connect” (por ejemplo “COM3”, COM4”, etc.). Seleccionaremos ese puerto COM, y también seleccionaremos la velocidad de conección “57600”. Luego, haremos clic en “Connect”.
Calibración de acelerómetros
Este paso es necesario para que la placa controladora pueda medir correctamente su posición en el espacio.
Para realizar esta calibración haremos clic en Mandatory Hardware y luego en Accel Calibration. Aparecerán dos botones verdes, de los cuales utilizaremos el primero, que dice Calibrate Accel. Luego de haer clic en el botón, nos pedirá que coloquemos el dron en distintas orientaciones, y que hagamos clic luego de cada una de ellas. Las posiciones en las que hay que colocarlo son las siguientes:
- Level (nivelado): en posición horizontal, apoyado sobre sus patas
- Left (izquierda): apoyado sobre el lado izquierdo
- Right (derecha): apoyado sobre el lado derecho
- Nose down (nariz hacia abajo): apoyado sobre el frente del dron
- Nose up (nariz hacia arriba): apoyado sobre la parte trasera
- Back (de espalda): con las patas hacia arriba
Calibración de brújulas
Este paso es necesario para que la placa controladora pueda medir correctamente su orientación respecto del Norte, utilizando la brújula interna de la placa Pixhawk y/o la brújula incorporada al módulo GPS. Para realizar esta calibración también es necesario mover el dron en distintas direcciones (aunque un poco distinto que en el paso anterior). Dado que las brújulas (o magnetómetros) miden el campo magnético terrestre, son muy sensibles a cualquier objeto metálico cercano. Por esto, la persona que vaya a mover el dron no deberá tener objetos metálicos (anteojos, celular, hebilla de cinturón, etc.) y deberá realizarse lejos de cualquier otro objeto metálico (muebles de metal, ventanas metálicas, vehículos, computadoras, etc.) o campos magnéticos. Lo ideal es realizarlo al aire libre.
Para realizar esta calibración haremos clic en Mandatory Hardware y luego en Compass. Luego haremos clic en Start. Empezaremos a escuchar un ‘bip’ cada 1 segundo, lo que indica que hay que empezar a mover el dron con movimientos circulares, orientando cada una de sus caras (abajo, arriba, izquierda, derecha, adelante y atrás) hacia el norte, intentando cubrir una especie de ‘esfera imaginaria’. En la pantalla del mission planner veremos unas barras verdes que aumentan de tamaño y un valor que va acercándose a 100. Cuando la calibración esté completa, aparecerá un mensaje de ‘Succesful calibration’.
Calibración de ESCs
Este paso es necesario para indicarle a los ESC cuáles son los valores mínimos y máximos de voltaje que la placa controladora les va a enviar (correspondientes a la velocidad mínima y máxima), para que luego aceleren todos a una misma velocidad.
Para realizar esta calibración haremos clic en Mandatory Hardware y luego en ESC Calibration. Para realizar el proceso de calibración hay que seguir los siguientes pasos:
- Hacer clic en el botón que dice Calibrate ESCs. Esto le indicará a la placa controladora que tiene que calibrar los ESCs, pero no lo hará inmediatamente, sino después de reiniciarla.
- El siguiente paso entonces es reiniciar la placa controladora, para lo cual primero hay que desconectar la batería (y también el cable USB en caso de estar conectado a la computadora mediante USB; si la conexión es por telemetría no hace falta). Luego de comprobar que la placa está apagada, la volvemos a encender.
- Ahora la placa se reiniciará y luego las luces LED cambiarán de color rápidamente indicando que va a realizar la calibración. Luego deberemos activar el botón de seguridad, dejándolo presionado unos segundos hasta que la luz roja se quede encendida. En ese momento escucharemos una melodía y 2 ‘bips’. Luego de esto deberemos esperar unos segundos a que los ESC emitan 3 ‘bips’ cortos y luego un ‘bip’ largo, indicando que la calibración se completó.
- Por último, volveremos a reiniciar la placa controladora normalmente, y volver a conectar el Mission Planner.
Para comprobar que la configuración está correcta, podemos volver a probar el giro de los motores como se hizo en la sección “Prueba de motores”. La diferencia es que ahora los motores deberían empezar a girar a un valor de aceleración (‘Throttle %’) de entre 5 y 10%, y todos a una velocidad muy similar.
Nota: en la parte inferior de la pestaña ‘ESC Calibration’ hay una serie de parámetros que se pueden modificar. Los valores que nos sugiere el Mission Planner por defecto funcionan bien, pero se pueden ajustar de ser necesario. Más información de cómo hacerlo aquí: http://ardupilot.org/copter/docs/set-motor-range.html
Calibración del radiocontrol
Esta calibración es necesaria para que la placa controladora reciba de forma correcta las órdenes que le enviaremos desde el transmisor de radio. Lo realizaremos en 3 pasos: la calibración del transmisor (el mando), la unión del transmisor con el receptor, y la calibración en el Mission Planner.
Configuración del transmisor de radio
Para poder utilizar el transmisor FlySky FS-i6 con el OVLI, deberemos realizar primero una serie de configuraciones en el mismo radiocontrol. Para esto utilizaremos los botones que tiene en la parte inferior (a la derecha y a la izquierda). El manejo del menú de configuraciones utilizando estos botones no es muy intuitivo, por lo que aquí hay un resumen de cómo utilizarlos:
Instrucciones para utilizar el menú del transmisor FlySky FS-i6:
|
Para poder utilizar el transmisor FlySky FS-i6 con el OVLI, deberemos realizar los siguientes pasos:
- [OPCIONAL] Si ya hemos usado este radiocontrol con otro dron, es posible conservar esa configuración y guardar aparte la configuración para utilizar el OVLI (eso es porque este transmisor soporta hasta XX equipos, llamados ‘modelos’). En caso de necesitar hacer esto, deberemos seleccionar un nuevo ‘modelo’ a utilizar. Para ello iremos a Menu > System > Model select, y seleccionaremos un modelo distinto al utilizado hasta ahora. Si el transmisor no lo hemos utilizado antes, no hace falta hacer nada.
- [OPCIONAL] También es posible ponerle un nombre al ‘modelo’, que será mostrado en la pantalla del transmisor. Esto es conveniente si vamos a usar el transmisor para más de un dron, pero también es posible hacerlo aunque lo usemos solo para uno. Para cambiar nombre al modelo iremos a Menu > System > Mode name, y ahí deberemos escribir el nombre cambiando letra a letra. Para guardarlo, se deja apretado CANCEL.
- Lo siguiente es habilitar la comunicación del transmisor con con el receptor en modo ‘PPM’, ya que este transmisor utiliza por defecto otro modo de transmisión (‘PWM’) que no funcionará con el receptor que utiliza el OVLI. Para hacer esto iremos a Menu > System > RX Setup y en PPM output pondemos ON.
- Luego, es necesario ‘invertir’ la señal de uno de los canales de transmisión de la radio, específicamente el canal 2, que corresponde al movimiento hacia adelante/atrás. Esto se debe simplemente a que en el firmware ArduPilot este canal funciona al revés. Para hacer esto iremos a Menu > Functions setup > Reverse, y allí deberemos ‘activar’ el botón correspondiente al canal 2.
- Por último, deberemos configurar cuáles de los interruptores y/o perillas de la parte superior del transmisor serán utilizados como canales auxiliares, para activar distintas funciones del OVLI (por ejemplo, configurar distintos ‘modos de vuelo’). Los canales auxiliares son dos, los canales 5 y 6, y los asignaremos a los interruptores ‘C’ y ‘D’ (‘SwC’ y ‘SwD’). Para esto iremos a Menu > Functions setup > Aux. channels, y lo configuraremos así: Channel 5: SwC y Channel 6: SwD
Unión del transmisor y el receptor
Si el receptor venía incluído con el transmisor, es probable que ambos ya estén configurados para comunicarse entre sí. En caso que los hayamos comprado por separado, será necesario hacer este paso para que ambos se comuniquen.
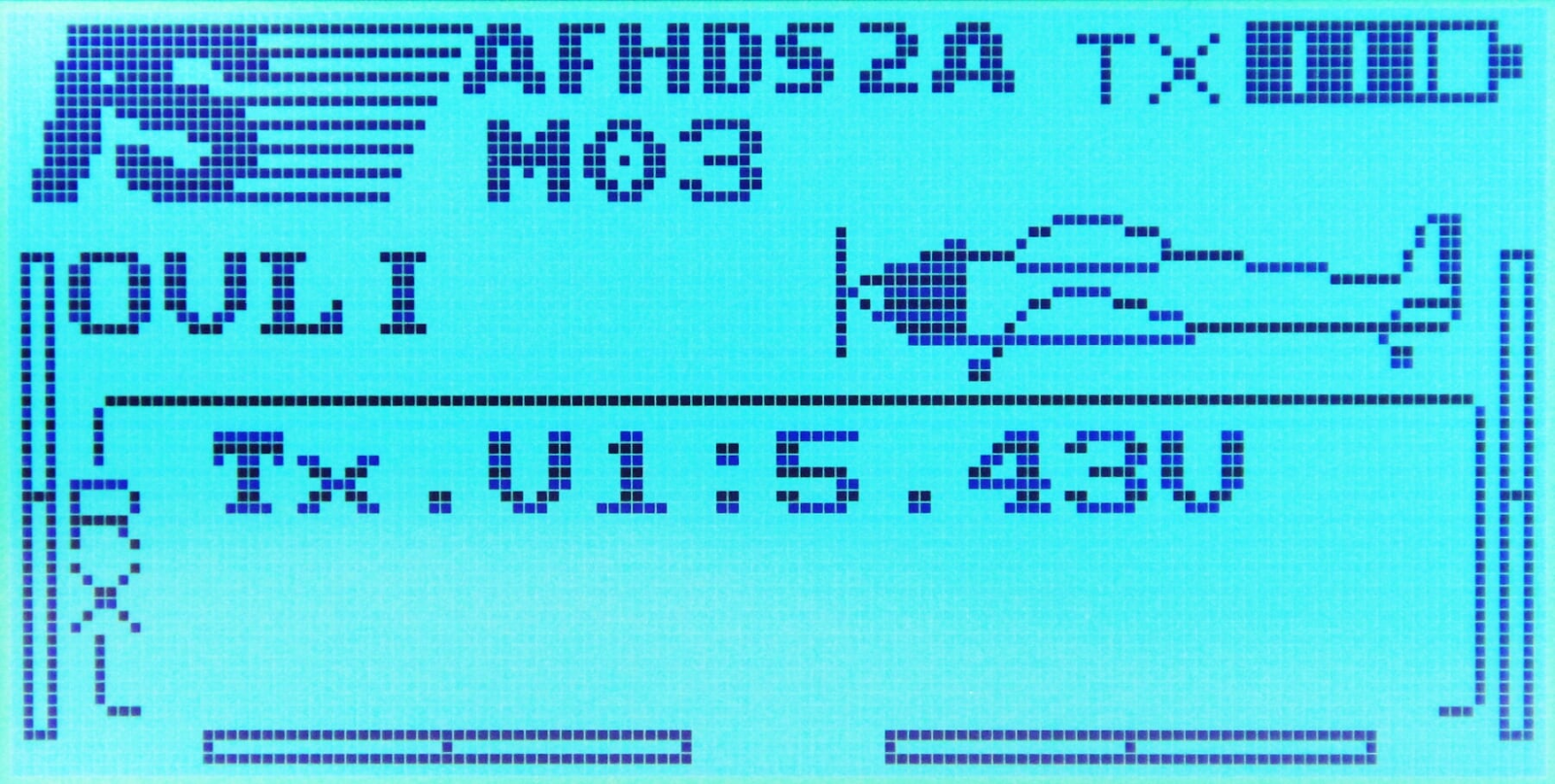
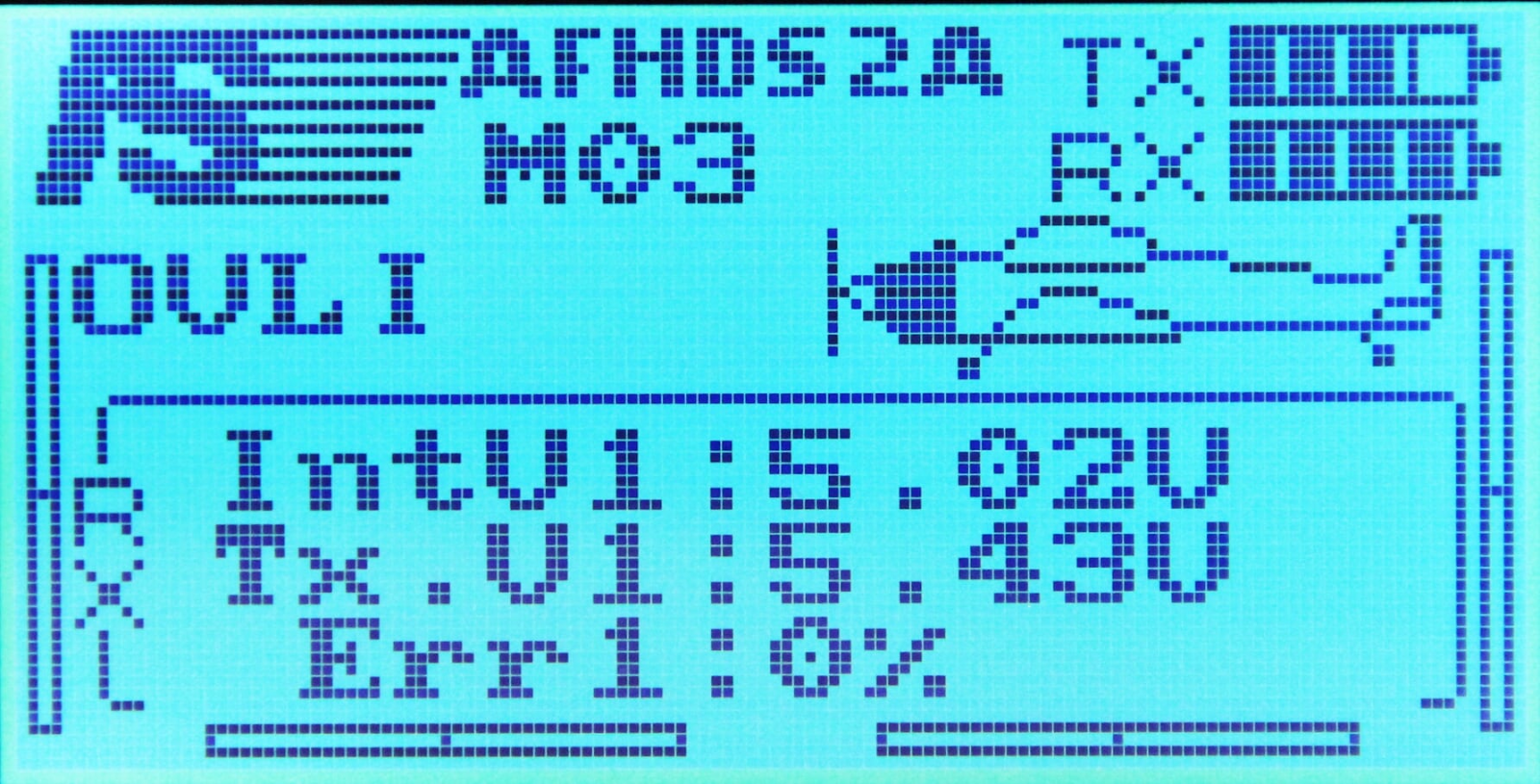
Para verificar si este paso es necesario o no, es posible encender el transmisor y el receptor (conectando la batería del dron), y verificar en la pantalla del transmisor si ambos se están comunicando o no.
Izquierda: transmisor y receptor no conectados. Derecha: transmisor y receptor conectados
En caso que no estén conectados, el procedimiento para hacer la unión entre ambos (‘bind’ en inglés) se encuentra en el manual del transmisor.
Calibración de la radio en Mission Planner
Este paso es necesario para indicarle a la placa controladora cuáles son los valores mínimos y máximos de señal va a enviar el receptor para cada canal, correspondientes a las posiciones extremas de cada una de las palancas del transmisor.
Para realizar esta calibración haremos clic en Mandatory Hardware y luego en Radio Calibration. Luego haremos clic en Calibrate Radio y deberemos mover cada una de las palancas (incluidos los interruptores que configuramos como canales auxiliares) hasta sus posiciones extremas (arriba, abajo, izquierda y derecha). Veremos que los valores de los distintos canales variarán entre aproximadamente 1000 y 2000. La placa controladora registrará para cada canal, cuál es el valor máximo y mínimo que el radiocontrol estará entregando (por ejemplo, para un canal puede ser de 1002 a 1995, etc.).
Selección de modos de vuelo
La placa controladora permite volar el dron de distintas formas. Por ejemplo, se puede volar con la ayuda del barómetro para controlar la altura, con la ayuda del GPS para mantener la posición, o libremente sin utilizar esos sensores. Eso se denomina “modo de vuelo” (Flight Mode), y es posible cambiarlo desde la radio o desde el Mission Planner. En este paso eseleccionaremos cuáles son los modos de vuelo que querremos utilizar (de los 20 disponibles), e indicarle a la placa controladora en qué posición de la palanca del radiocontrol seleccionada para el canal 5 activar cada uno.
Algunos de los modos de vuelo más utilizados son los siguientes:
- Stabilize (=estabilizar): mantiene estable el dron en posición horizontal, pero es necesario mantener la altura y controlar los desplazamientos manualmente
- AltHold (altitude hold=mantener altitud): mantiene estable el dron y mantiene la altura utilizando el barómetro, pero es necesario controlar los desplazamientos manualmente
- Loiter (=merodear): mantiene la altura utilizando el barómetro y la posición utilizando el GPS
- RTL (return to launch=volver al lanzamiento): vuelve al lugar desde donde despegó y aterriza automáticamente
- Auto (automático): sigue un vuelo programado (‘misión’) de forma automática
Para realizar esta calibración haremos clic en Mandatory Hardware y luego en Flight Modes. En esta pestaña encontraremos una especie de tabla con 6 filas. En cada una de ellas hay una lista desplegable, que nos permite elegir en cada una un modo de vuelo distinto. A la derecha de la tabla veremos una serie de valores, que nos están indicando a qué valor del canal 5 del radiocontrol corresponde cada fila. Si recuerdan, en el paso anterior habíamos configurado una de los interruptores de la parte superior de la radio para el canal 5 (la palanca con 3 posiciones). También vimos que al mover esa palanca el valor que recibe la placa varía entre aproximadamente 1000 y 2000 (y aproximadamente 1500 en la posición central). Si ahora movemos esa palanca, veremos que hay una fila que cambia a un color verde, y que solo 3 filas se ‘activan’: las que a la derecha indican los valores cercanos a 1000, 1500 y 2000. Con la lista desplegable de esas 3 filas podremos configurar los 3 modos de vuelo que podremos luego seleccionar utilizando esa palanca del radiocontrol. Los modos de vuelo que sugerimos configurar son:
Modos de vuelo para entrenamiento inicial:
- Palanca hacia arriba (1000): Stabilize
- Palanca en el medio (1500): AltHold
- Palanca hacia abajo (2000): Loiter
Modos de vuelo para uso habitual:
- Palanca hacia arriba (1000): Stabilize
- Palanca en el medio (1500): Loiter
- Palanca hacia abajo (2000): RTL
Nota: por seguridad, el modo de vuelo “Auto” (guiado por GPS según plan de vuelo) es conveniente activarlo solamente desde la computadora. Si estuviera configurado para activarse con una palanca del radiocontrol, podría activarse de forma accidental, lo cual podría resultar peligroso.
Calibración del medidor de voltaje
Este paso es necesario para que la placa controladora pueda medir correctamente el voltaje de la batería (para saber el nivel de carga) y la corriente (para saber cuánto es el consumo.
Para realizar esta calibración haremos clic en Optional Hardware y luego en Battery Monitor. Luego deberemos seleccionar las siguientes opciones:
- Monitor: seleccionar la opción ‘Voltage and current’, ya que el módulo que utilizamos mide ambas variables.
- Sensor: seleccionar la opción ‘Other’, ya que esta opción nos permite calibrar con precisión nuestro sensor (las otras opciones nos dan valores por defecto para módulos de distintas marcas)
- APM Ver: seleccionaremos la opción ‘Pixhawk’.
- Battery Capacity: indicaremos aquí la capacidad de nuestra batería, en miliamperes hora (mah).
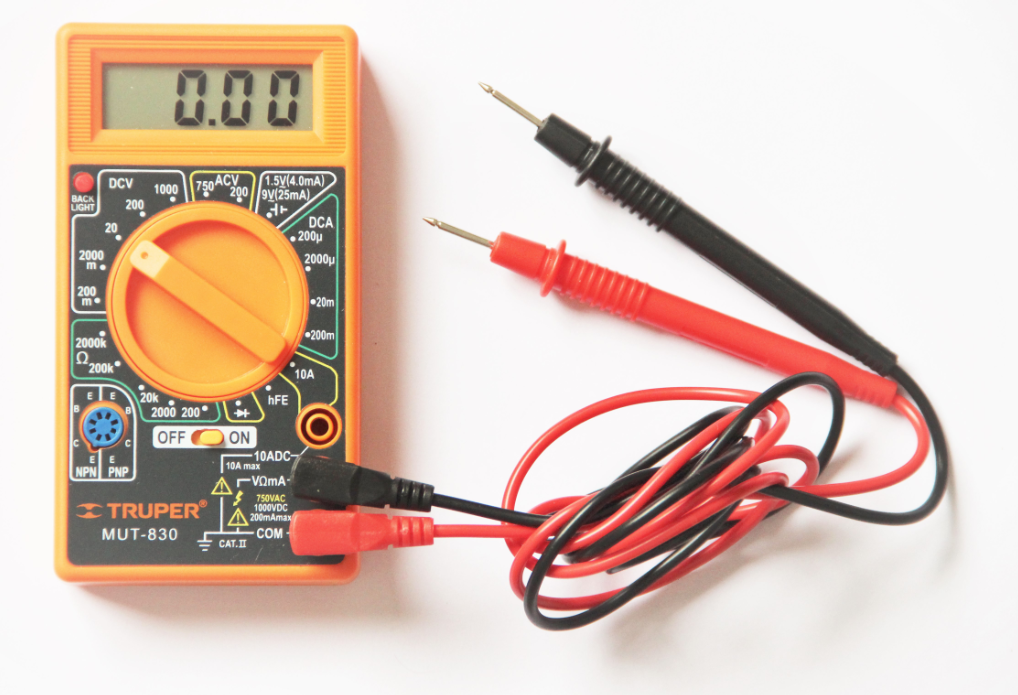
Lo siguiente que deberemos hacer es medir de forma precisa con un ‘tester’ (los medidores de voltaje que se utilizan para trabajos de electricidad) el voltaje de la batería. Para eso desconectaremos brevemente la batería, y mediremos el voltaje en los contactos del conector amarillo XT60.
Cómo utilizar el medidor de voltaje: Los medidores de voltaje traen un par de cables, rojo y negro, los cuales se conectan al aparato en un extremo, y tienen una punta metálica en el otro. El lugar donde se conecta el cable negro (negativo) suele estar indicado como “COM”, mientras que el cable rojo (positivo) se conecta en ditinto lugar dependiendo qué se va a medir (corriente, voltaje, resistencia, etc. - en nuestro caso vamos a medir voltaje). Además, estos medidores de voltaje suelen tener un selector circular, con el cual podemos elegir qué variable medir. Una de la ‘zonas’ del círculo es para la medición de voltaje para un circuito de corriente continua (como en es en este caso, a diferencia de la corriente alterna de los circuitos de 110 o 220 volts). Dentro de esta ‘zona’ del círculo suele haber distintos valores, que indican rangos de voltaje para la medición (por ejemplo 2, 20, 200, 2000), entre los cuales seleccionaremos el más adecuado para medir el voltaje de la bateria, que es de aproximadamente 12 volts (por ejemplo, 20). |
Luego volveremos a conectar la batería, y una vez encendido el dron, verificaremos que el Mission Planner está conectado. De ser necesario, iremos de nuevo a la pestaña de ‘Battery Monitor’, e introduciremos el valor de voltaje que medimos en el casillero ‘1. Measured Battery Voltage’. Luego presionamos la tecla ‘tab’ o seleccionamos otra casilla, para que los valores se actualicen. Si esto funcionó correctamente, si vamos a la ventana inicial de ‘FLIGHT DATA’, podremos ver el voltaje correcto en la parte inferior izquierda del panel con el horizonte artificial.
IMPORTANTE: Esta calibración utilizando 1 solo punto de medición funciona en la gran mayoría de los casos, y un medidor de voltaje fallado no nos permitirá realizar esta calibración. Sin embargo, en ciertos casos un medidor de voltaje fallado podría medir de forma correcta un voltaje, pero no medir correctamente las variaciones de voltaje. Una forma sencilla de chequear esto es controlar la medición de voltaje cuando conectamos una batería con voltaje bajo.
Nota: Si bien no suele ser necesario también es posible calibrar la medición de corriente. Un ejemplo de cómo hacerlo aquí:
https://www.rcgroups.com/forums/showthread.php?2279282-Calibrating-the-APM-Power-Current
Configuración de Failsafe
Este paso es necesario para que ante una falla que podría comprometer la seguridad del dron (baja batería o pérdida de conexión con el radiocontrol), se realice una acción que permita “fallar de forma segura” (=fail safe). La acción que generalmente se configura para realizar es la activación del modo ‘RTL’, que hace que el dron vuelva al lugar donde despegó y aterrice de forma automática.
Para realizar esta calibración haremos clic en Mandatory Hardware y luego en FailSafe. A la derecha de la pantalla están las opciones para configurar el FailSafe de batería, el FailSafe de radiocontrol, y el FailSafe de Mission Planner (GCS=gound control station=estación de control de tierra). Seleccionaremos las siguientes opciones:
- En Battery
- Low battery (=batería baja): 10.5 (este valor de voltaje luego lo podremos regular de acuerdo al comportamiento de nuestra batería)
- Reserved MAH (=miliamperes de reserva): el valor por defecto es 0, lo que significa que no tiene en cuenta el consumo de batería para el FailSafe (sólo el voltaje). Si sabemos que la medición de corriente y consumo es correcta, podemos también poner aquí el 20% de la capacidad total de la batería (por ejemplo, si la batería es de 3300 mah, pondremos 660).
- En la lista desplegable seleccionaremos RTL
- En Radio
- En la lista desplegable seleccionaremos Enabled always RTL
- Colocaremos abajo un valor menor al valor mínimo que nos entrega la radio para el canal del acelerador (que lo vimos cuando configuramos la radio). El valor por defecto de 975 suele ser suficiente (generalmente el valor mínimo que entrega la radio es aproximadamente 1000).
- En GCS
- Habilitar la opción GCS FS Enable
Nota: es posible activar un segundo nivel de FailSafe de batería, para realizar una acción a un nivel de batería ‘crítico’. Esto es útil, por ejemplo, en el caso en que se active el FailSafe por batería baja a una distancia muy grande del punto de despegue. Esto haría que en el trayecto de vuelta la batería pudiera bajar demasiado. En este caso, un segundo nivel de FailSafe podría estar configurado para aterrizar (opción ‘Land’) en el lugar que esté (no es lo ideal, pero es mejor que una caída). Detalles aquí:
http://ardupilot.org/copter/docs/failsafe-battery.html#two-layer-failsafe (estos parámetros se modifican en la pestaña CONFIG/TUNING > Full Parameter List
Paso 6: Pruebas pre-vuelo
Antes de volar, es conveniente probar que el dron responde correctamente a las órdenes que le damos desde la radio, y también que está funcionando bien la estabilización automática. Para estas prueba deberemos colocar la batería y conectar la radio, y tener el dron conectado al Mission Planner.
Prueba nro 1
ADVERTENCIA DE SEGURIDAD: esta prueba deberemos realizarla sin las hélices. Tampoco es necesario que esté colocada la cámara. |
En principio, colocaremos el dron en posición completamente horizontal (por ejemplo sobre una mesa). Luego, en la pestaña ‘INITIAL SETUP’, iremos a ‘Mandatory Hardware’, luego a ‘Accel Calibration’ y haremos clic en ‘Calibrate Level’. Con este paso, nos re-aseguramos que la placa controladora va a considerar a esa posición como su ‘posición horizontal’ de referencia, y no va a intentar corregirla al activar los motores.
Armado de motores: Al conectar la batería del dron, los motores no responden inmediatamente a los controles de la radio porque se encuentran ‘desarmados’. Solo será posible que giren una vez que le damos la orden de ‘armar’, evitando así posibles accidentes. En este dron hay dos pasos para armar los motores: un botón de seguridad en el dron, y una orden desde el radiocontrol. Para que los motores giren y poder volar es necesario realizar ambos pasos, mientras que es posible desactivarlos con solo uno de ellos (desde el dron o desde el radiocontrol). El botón de seguridad del dron se activa (y desactiva) dejándolo apretado un par de segundos. Mientras el botón de seguridad está desactivado, escucharemos un pitido repetitivo desde los motores (estos son los variadores indicando que no están recibiendo ninguna señal desde la placa controladora) y la luz roja del botón estará titilando. Una vez activado, la luz roja del botón se quedará encendida de forma continua, y el sonido de los motores se detendrá. El armado de los motores desde el radiocontrol se realiza colocando la palanca izquierda de la radio en posición ‘abajo-derecha’ durante unos segundos, mientras que colocándola en posición ‘abajo-izquierda’ los motores se desarman. Una vez armados, los motores girarán a baja velocidad. Esto hace que sea visible que los motores están activos y que el dron puede despegar en cualquier momento. |
Utilizando la radio armaremos los motores, los cuales comenzarán a girar a baja velocidad. Moviendo la palanca izquierda hacia arriba, deberá aumentar la velocidad de todos los motores a la vez. Moviendo la palanca de la derecha hacia alguno de los lados, los motores de ese lado deberán bajar la velocidad, mientras que los del lado opuesto la aumentarán. Lo mismo debería observarse al mover la palanca derecha hacia adelante y hacia atrás. Esa diferencia de velocidades hace que el dron se incline y avance hacia el lado indicado mediante el radiocontrol. Moviendo la palanca izquierda hacia los lados hará que se aceleren los motores 1 y 2 (que giran en sentido antihorario) o los motores 3 y 4 (que giran en sentido horario), lo cual hace que el dron gire sobre su eje.
Luego, sin mover los controles de la radio, tomaremos el dron y comenzaremos a inclinarlo en distintas direcciones. Deberemos observar si, al inclinarlo, los motores que quedan más abajo que los otros aumentan su velocidad. Esto se debe a que, de forma automática, la placa controladora está intentando volver a colocarse de forma horizontal (lo cual sucedería si estuvieran colocadas las hélices, ya que eso haría que se eleve el lado en el cual los motores se aceleran).
Si todo funciona correctamente, estamos listos para realizar la siguiente prueba.
Prueba nro 2
ADVERTENCIA DE SEGURIDAD: esta prueba la realizaremos con las hélices. Las hélices las colocaremos estando el dron con la batería desconectada, y no la conectaremos hasta no estar el dron colocado de forma segura, como se indica más adelante. Es conveniente realizar el chequeo pre-vuelo (aunque no vayamos a volar de verdad) que figura en la Guía de uso del dron OVLI en vuela.cc/guia |
Esta segunda prueba, la realizaremos con el dron atado con hilos, de forma tal de poder probar sus movimientos de forma segura.


Colocación de las hélices
Las hélices tienen inscripciones en su parte superior. Por lo tanto, se deben colocar siempre con las inscripciones hacia arriba. Cada hélice puede ser R (right o derecha en español) o L (left o izquierda en español) y esto suele estar señalado en estas inscripciones. El dron deberá incluir dos Rs y dos Ls. Deberemos fijarnos cuál es el lugar adecuado para cada hélice al observar las inscripciones en la estructura (ver foto XX).
Si todo funciona correctamente, estamos listos para realizar una prueba de vuelo. Sin embargo, la recomendación para quienes vuelan drones por primera vez es que utilicen primero un simulador de vuelo en el computador. Para esto sugerimos utilizar el simulador XX, el cual puede ser descargado desde [link]. Una vez instalado, deberán conectar el radiocontrol y la computadora a través de una interfaz USB y un cable compatible con la radio que estemos utilizando (por ejemplo este: [link]).
Una vez completadas las pruebas, el OVLI está listo para volar. Las instrucciones de vuelo y para su uso para captura y procesamiento de imágenes aéreas están en la Guia de uso, que está en la página vuela.cc/guia |
Instalación de los componentes de software
Mission Planner

El programa Mission Planner nos permite utilizar una computadora portátil como “estación de tierra” durante el vuelo para visualizar información clave del dron en tiempo real (ubicación, nivel de batería, etc.), así como para generar los planes de vuelo autónomo. También se utiliza este mismo programa para la configuración inicial del dron.
Link de descarga del Mission Planner: http://firmware.ardupilot.org/Tools/MissionPlanner/MissionPlanner-latest.msi |
Pasos para la instalación del Mission Planner
- Descargar el archivo .msi
- Ejecutar el archivo y seguir las instrucciones de instalación
- Durante la instalación, cuando pregunte sobre algo llamado “Altitude Angel” responder que NO
ArduPilot

Antes de comenzar a utilizar la placa controladora PixHawk, es necesario cargarle el software (específicamente, un tipo de software llamado ‘firmware’) que correrá en la placa durante el vuelo. El firmware de código abierto que utilizaremos se llama ‘ArduPilot’, y para cargar este firmware en la placa controladora, y para luego configurarlo, utilizaremos el programa Mission Planner.
Para este paso es necesario conectar la placa controladora, mediante un cable USB, a la computadora en la cual hayamos instalado el Mission Planner. En ciertas computadoras no se reconoce inmediatamente la tarjeta PixHawk, y es necesario instalar un controlador o ‘driver’.
Link de descarga del controlador USB para la placa PixHawk: https://www.silabs.com/products/development-tools/software/usb-to-uart-bridge-vcp-drivers |
Pasos para la instalación del controlador USB para la placa PixHawk:
- Ir al link de la página de silabs, y hacer clic en “Downloads”
- Descargar el .zip correspondiente al sistema operativo (por ejemplo windows)
- Descomprimir el archivo completo en una carpeta
- Entrar a la carpeta y ejecutar el archivo ejecutable correspondiente a la versión del sistema operativo
Pasos para la instalación del firmware ArduPilot:
- Conectar la placa PixHawk a la computadora mediante un cable USB
- Abrir Mission Planner
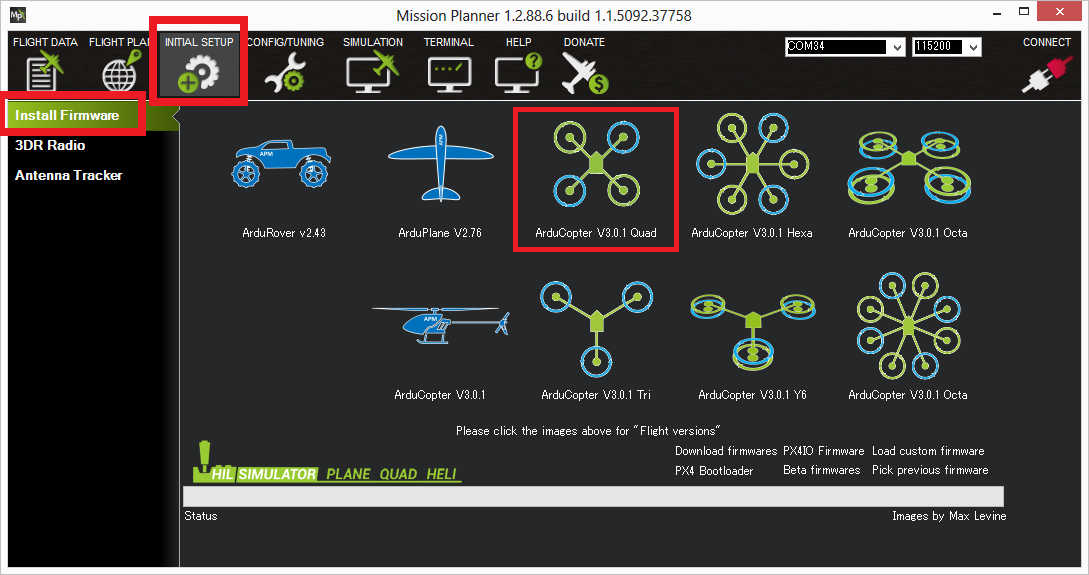
- Ir a la pestaña ‘INITIAL SETUP’ (en la parte superior de la pantalla), luego a ‘Install Firmware’
- Seleccionar el tipo de dron (en este caso el ‘quad’), hacer clic en OK y seguir las instrucciones en pantalla
- Una vez finalizado, hacer clic en ‘Connect’ y esperar que la conexión se complete
- Luego, dentro de ‘INITIAL SETUP’, hacer clic en ‘Mandatory Hardware’ y luego en ‘Frame Type’. Luego seleccionaremos ‘Quad’ en la lista de clases en la parte superior, y la opción que incluye el dron en forma de ‘X’ del listado en la parte inferior.
Canon Hack Development Kit (CHDK)
El software de CHDK permite utilizar distintas cámaras de la marca Canon en formato manual (ajustar la velocidad de obturación, el ISO, utilizar time-lapse, etc.). Estas instrucciones son para el modelo de cámara Canon ELPH180 o ELPH100 que incluimos en el Open Drone Kit, pero sirven para otros modelos similares. Más info en: http://chdk.wikia.com/wiki/CHDK
El software CHDK debe ser instalado en la tarjeta de memoria de la cámara. La forma más fácil de hacerlo es utilizando una pequeña aplicación llamada STICK (Simple Tool for Installing CHDK). A esta aplicación deberemos cargarle una foto tomada con nuestra cámara, la cual utilizará para detectar el modelo exacto y descargar la versión correspondiente del CHDK.
Link de descarga de STICK: |
Pasos para instalar CHDK mediante la aplicación STICK:
- Instalar la tarjeta de memoria en la cámara
- Encenderla y tomar una foto
- Apagar la cámara, sacar la tarjeta de memoria y colocarla en la computadora (si la computadora no tiene lector de tarjetas SD, será necesario utilizar un lector externo)
- Copiar la foto que tomamos a nuestra computadora
- Extraer el archivo .zip de STICK en cualquier lugar de nuestra computadora
- Entrar a la carpeta llamada ‘stick’ y ejecutar el archivo ‘stickx’ (con x)
[ captura de pantalla ]
- Hacer clic en el botón ‘Browse’, y abrir la foto. El programa detectará el modelo de cámara y la versión del firmware y las mostrará en la ventana
- Hacer clic en ‘Download’. El programa buscará en internet la versión más reciente de CHDK para nuestro modelo de cámara (nos mostrará en la parte inferior de la ventana un mensaje “Downloading - please wait…”)
- Si el botón de ‘Download’ no está disponible, y aparece el mensaje “No official build is available for this camera”, significa que no hay una versión ‘estable’ disponible para esa cámara. En ese caso, es posible que exista una versión ‘no-oficial’ o de prueba, y la podremos buscar haciendo clic en el botón ‘Restart’ (en la parte inferior de la ventana), seleccionando la opción ‘Development’ (en la parte superior), y cargando nuevamente la foto
- Luego haremos clic en ‘Scan for cards’ y seleccionaremos de la lista desplegable nuestra tarjeta de memoria (¡tener cuidado de no confundirla con alguna otra unidad extraíble USB, ya que este proceso borrará todo el contenido!)
- Finalmente, haremos clic en ‘continue to Install Step’
- Por último, antes de colocar la tarjeta de memoria nuevamente en la cámara, deberemos colocar el seguro contra escritura de la tarjeta (una pequeña pestaña en uno de los lados de la tarjeta). Esto no es para que no se pueda escribir en la tarjeta, sino que nos permite indicarle al software CHDK que se ejecutará en la cámara si queremos utilizar la cámara en ‘modo hackeado’ (con el seguro) o en ‘modo normal’ (sin el seguro).
[ foto tarjeta sd ]
Configuración de disparo automático
Mediante los siguientes pasos seleccionaremos un programa que se ejecutará cada vez que se encienda la cámara, y que hará que tome imágenes de forma automática cada cierta cantidad de segundos.
- Encender la cámara, y presionar levemente el botón de disparo para pasar al modo de captura
- Presionar el botón PLAY (▶️) para pasar al modo <ALT> (modo de funciones extendidas de la cámara)
- Presionar MENU para acceder al menú y luego acceder a la opción Script (program your camera)
- Seleccionar la opción Load Script from File… para seleccionar el programa que va a ejecutar la cámara, y luego seleccionar del listado el programa INTERVAL.BAS
- Luego hay que elegir el intervalo entre imágenes (generalmente se usa 2 segundos) bajando hasta donde dice interval (sec) y presionando los botones izquierda/derecha (de los botones en forma de círculo) para disminuir/aumentar el valor
- Luego, para que el programa se ejecute automáticamente, ir a la opción Autostart y elegir la opción ON
- Por último, salir del menú presionando el botón MENU
Nota: de ahora en adelante, cada vez que se encienda la cámara, comenzará a tomar imágenes de forma automática. Para detener la captura, presione el botón de disparo.
[ captura de pantalla ]
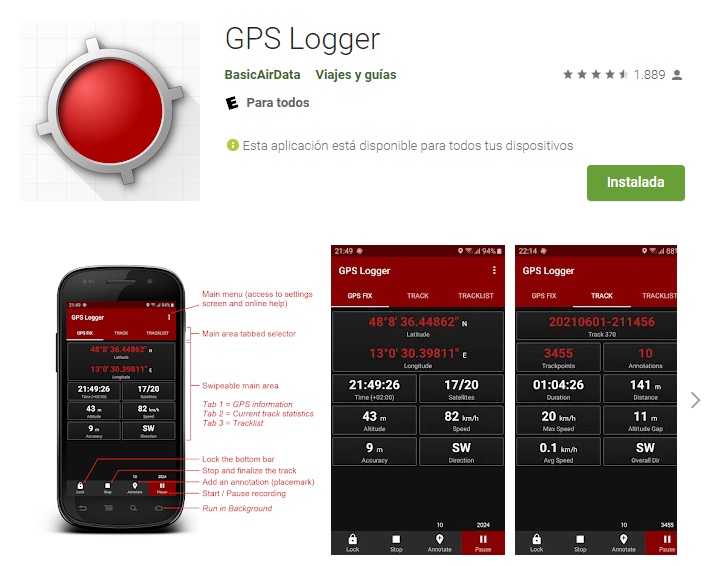
BasicAirData GPS Logger
GPS Logger es una app para teléfonos celulares Android que registra las coordenadas GPS de un recorrido. Nos permite marcar el área que queremos relevar recorriendola con nuestro teléfono, para luego utilizarla para crear el plan de vuelo del dron. Existen otras apps que cumplen esta misma función, pero GPS Logger es además libre y de código abierto. Para instalarla podemos buscarla en Google Play, o abrir el siguiente link:
Link de descarga de la app GPSLogger: https://play.google.com/store/apps/details?id=eu.basicairdata.graziano.gpslogger&hl=es |
Una vez instalada, es conveniente configurar el intervalo de toma de datos para que el recorrido guardado tenga más detalle y precisión:
- Abrir el menú (los tres puntos “...”) y elegir “Ajustes”
- Ir a la opción “Intervalo de actualización GPS” y seleccionar “1 segundo (alta precisión)” o “El más corto disponible”
OpenDroneMap
El software de código abierto OpenDroneMap (www.opendronemap.org) permite procesar las imágenes aéreas obtenidas y unirlas para generar un ortomosaico u ortofotografía. Este mosaico es la unión de las fotos individuales, corregidas de forma tal que todos los elementos estén en la misma escala, sin deformaciones ni perspectiva, tal como en un plano o un mapa.
Existen varias formas de utilizar este software, cada una con sus ventajas y desventajas. Para entender mejor cada una de estas opciones, es necesario distinguir entre los dos componentes principales de este software:
- El “motor” de procesamiento, que es la parte del software que realiza el trabajo de unir las imágenes para formar el mosaico. Esta parte del software es la que se llama propiamente OpenDroneMap, y puede ejecutarse de dos formas:
- “local: el motor de procesamiento se ejecuta en nuestro propio equipo
- “en la nube”: el motor de procesamiento se ejecuta en un servidor al que accedemos via internet
- La interfaz mediante la cual le enviamos las imágenes originales al motor de procesamiento, le indicamos las distintas opciones, y recibimos los resultados. Esta interfaz puede ser:
- “línea de comandos”: escribiendo los comandos desde el teclado
- “interfaz gráfica local”:, desde un programa en nuestro equipo con una interfaz gráfica (seleccionando las imágenes y ocpiones mediante clics del mouse)
- “web”: a través de una página web a la que accedemos por internet (también con una interfaz gráfica)
La interfaz a utilizar dependerá principalmente de las preferencias de los usuarios, mientras que dónde realizar el procesamiento podrá responder a razones técnicas o económicas. La ventaja de ejecutar el motor de procesamiento en nuesto propio equipo es que se puede trabajar de forma completamente offline, mientras que la desventaja es que se necesita contar con un equipo con un procesador rápido y mucha memoria. La ventaja de procesar las imágenes en un servidor es que permite acceder a un procesamiento más rápido, mientras que la desventaja suele ser tener que pagar para utilizar dicho servidor (ya que el servidor suele ser un equipo ajeno). En caso de no contar con un equipo propio con las características necesarias, puede llegar a ser más conveniente pagar por la utilización de un servidor que comprar un equipo especialmente para el procesamiento de las imágenes.
A continuación se indican las instrucciones para instalar/utilizar OpenDroneMap de distintas maneras.
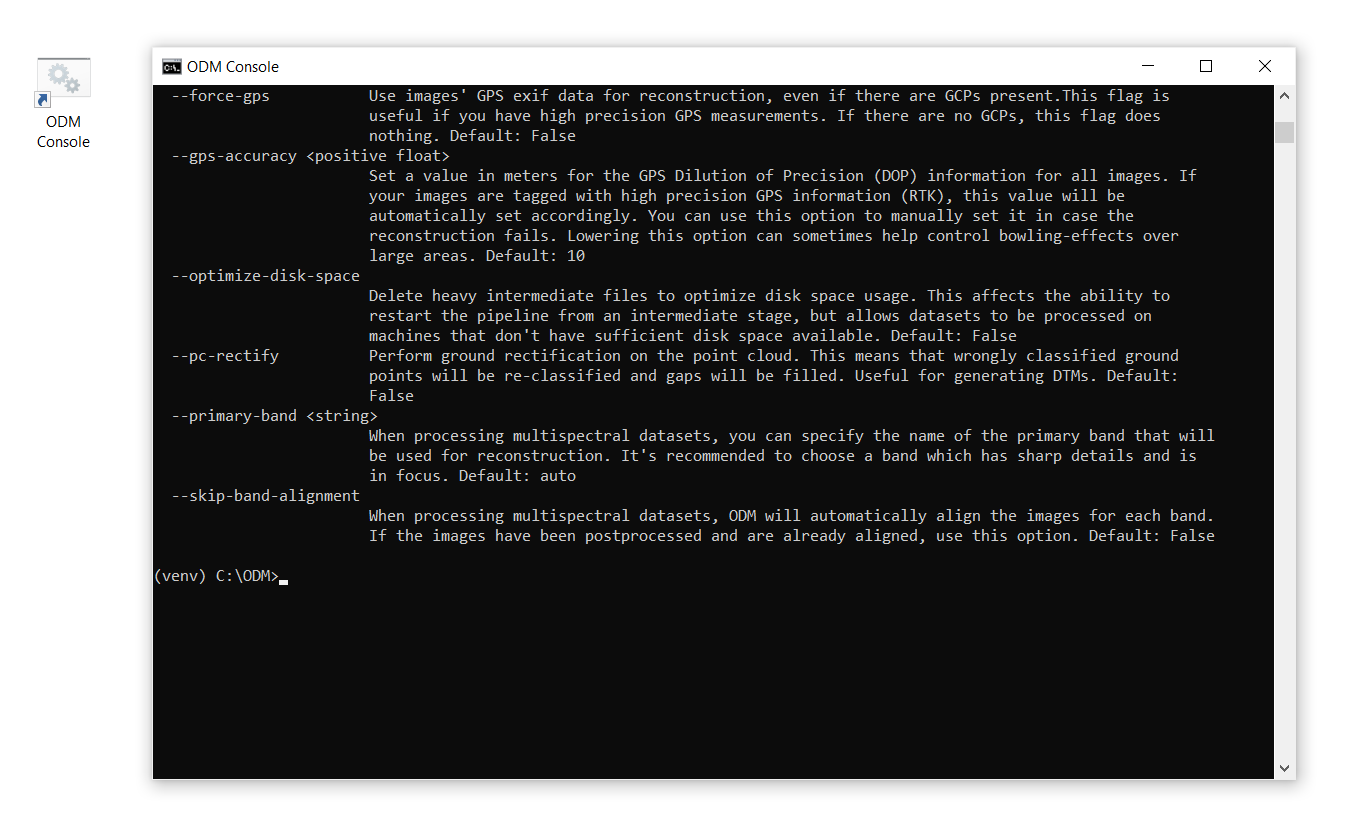
OpenDroneMap “local” desde la línea de comandos
Para utilizar OpenDroneMap en nuestro propio equipo, interactuando desde la línea de comandos, deberemos instalar solamente el motor de procesamiento OpenDroneMap. Para instalarlo en Windows, descargar la última versión desde el siguiente link:
Link de descarga de OpenDroneMap: |
Luego de ejecutar el archivo de instalación .exe, se creará un acceso directo llamado “ODM Console”. Al ejecutarlo se abrirá una ventana con la “consola” o línea de comandos, en donde se deberán ingresar los comandos para realizar el procesamiento. En la Guía de uso del Open Drone Toolkit se describen los pasos a seguir para procesar un conjunto de imágenes de un vuelo y obtener los resultados.
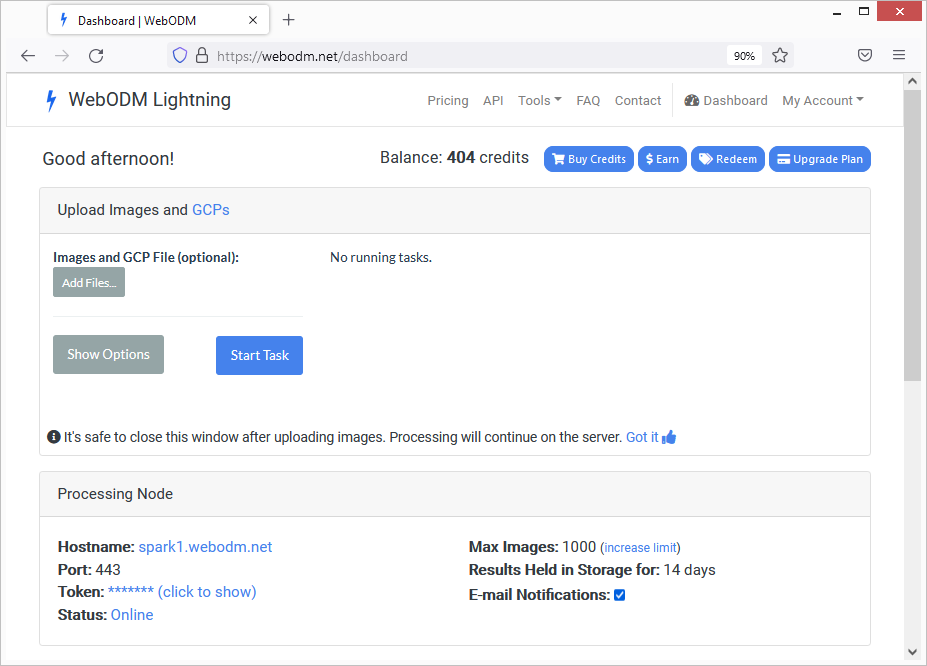
OpenDroneMap “en la nube” desde el servidor WebODM Lightning
Existe un servicio comercial que permite utilizar OpenDroneMap sin tener que instalarlo, llamado WebODM Lightning. Este servicio es mantenido por los desarrolladores principales del OpenDroneMap, y se accede a través de la compra de ‘créditos’ para el procesamiento de imágenes (aprox 1 USD por cada 80 imágenes; al registrarse se obtienen algunos créditos gratuitos que permiten probar el sistema). La utilización es a través de una interfaz gráfica sencilla. En la Guía de uso del Open Drone Toolkit se describen los pasos a seguir para procesar un conjunto de imágenes de un vuelo y obtener los resultados.
Link para el acceso al servicio WebODM Lightning: |
OpenDroneMap “en la nube” desde una interfaz gráfica local
También es posible instalar en nuestro equipo un programa que provee una interfaz gráfica más completa que la del sitio webodm.net, con más opciones para el procesamiento y la visualización de los resultados (por ejemplo con visualizaciones en 3D). El programa local sólo provee la interfaz, mientras que el procesamiento se realiza en el servidor de WebODM Lightning (con el mismo costo que utilizarlo desde la web). En la Guía de uso del Open Drone Toolkit se describen los pasos a seguir para procesar un conjunto de imágenes de un vuelo y obtener los resultados.
Link para descargar la interfaz gráfica local WebODM: |
[ captura de pantalla ]
OpenDroneMap “local” con interfaz gráfica
Existe otra opción que permite contar en nuestro equipo tanto con el motor de procesamiento como con la interfaz gráfica. Lamentablemente, el proceso de instalación es más complejo. Una vez instalado, la utilización de la interfaz es similar a cuando se utiliza el procesamiento en la nube, sólo que éste se realizará en nuestro propio equipo. Para realizar la instalación se deberán seguir las instrucciones que se detallan en el siguiente link:
Link con las instrucciones para instalar WebODM para procesamiento local con interfaz gráfica: |
QGIS

Existen muchas opciones basadas en software libre para procesar los mosaicos obtenidos y obtener información de ellos, y la mejor opción va a depender mucho de las características de las imágenes y del objetivo del proyecto. Uno de los más completos, y el que recomendamos para el Open Dron Toolkit es el software QGIS.
QGIS es un programa especializado en información geográfica, que permite trabajar con múltiples capas de información, tanto de imágenes de aéreas o satelitales (llamadas capas ‘ráster’) como puntos, líneas o polígonos (llamados capas ‘vectoriales’).
Para instalarlo se puede descargar desde el siguiente link:
Link de descarga de QGIS: |
En esa página conviene seleccionar entre los “instaladores autónomos (MSI)“ la opción “Versión con Soporte a Largo Plazo (mas estable)”.
Bitácora

{kind=link}
{kind=link}
La aplicación de código abierto Bitácora, desarrollada especialmente para el OSDT, ayuda a visualizar y organizar todos los archivos, imágenes y metadatos generados antes, durante y luego del vuelo, para almacenarlos, compartirlos o continuar su análisis. El usuario sólo necesita guardar en una misma carpeta todos los archivos generados (polígono del área relevada, plan de vuelo, imágenes capturadas, mosaico, modelo de elevación, etc.), y el programa generará automáticamente un mapa visualizando los archivos y una tabla con información del vuelo (fecha y hora del vuelo, ubicación, altitud, velocidad, nombres de archivos relevantes). Esta información también se guarda en formatos abiertos compatibles con otros programas (tabla de información de vuelo en formato csv, mapa en formato png y kml).
Link de descarga de Bitácora: |
Pasos para la instalación de Bitácora
- Descargar el archivo zip
- Extraer los archivos del zip, y copiar la carpeta bitacora a la carpeta C:/Archivos de programa o a cualquier otra ubicación
- Para abrir Bitácora, hacer doble clic en el archivo ejecutable bitacora.exe (para más comodidad, se puede crear un acceso directo, o arrastrar el archivo a la barra de tareas para fijarlo)