Piezomotor calibration
The scope of this procedure is to calibrate the Piezo motor. The Piezo takes a voltage to move the tip of a needle a certain amount. During this procedure you need to map spatial motion to voltage input sent to the Piezo. The program includes a semi-automated procedure for Piezo calibration, but you can also perform the calibration without it, which is pretty good and fast (I prefer manual - tibi).
Manual adjustment of the needle before the calibration
Using the Piezo Calibration.vi program for calibration
Going manual (a faster method)
Manual adjustment of the needle before the calibration
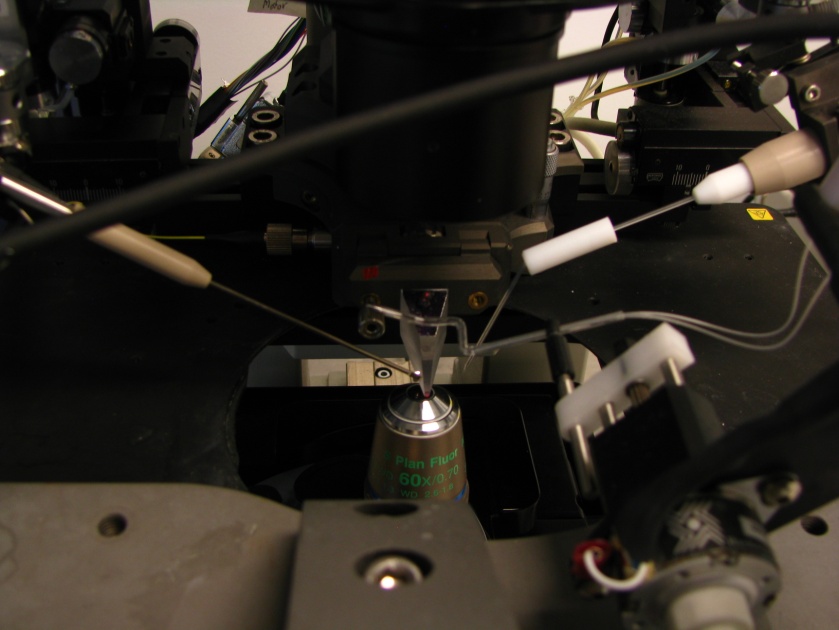
- Make sure that the piezo moves the tip of the needle parallel to the focal plane of the objective. In other words, if you move needle with the help of the piezo the tip of the needle stays in focus at 60X. For the CFI Plane Fluor ELWD 60x (0.7NA) objective you have a depth of field of 1.21 microns (see calculator provided by Nikon), which represents your error. If the tip of the needle goes in and out of the focal plane (the image of the tip becomes flue) rotate the Piezo motor (see red arrow in the picture bellow) and reiterate the process.
- Make sure that the needle moves in the right direction, on the focal plane. In other words, even if the needle tip stays on the focal plane for large displacements, it still has two dimensions of freedom. Normally you want the needle to move in a direction parallel to the myofibril. Monitor the needle tip at 60X while you move it with the piezo for large distances. Adjust the angle/tilt of the piezo from the mechanical arm until the motion is in the right direction. The angle adjustments of the piezo might be coupled, therefore you need to make sure that the needle is still in the focal plane. If it is no more, reiterate these two steps until you get close enough to the ideal situation.
Using the Piezo Calibration.vi program for calibration
You can use the Piezo Calibration.vi program for calibration located here C:\...\TRMFM
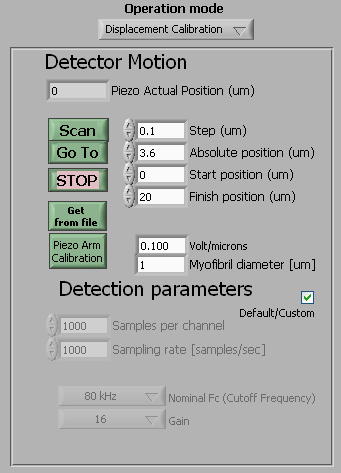
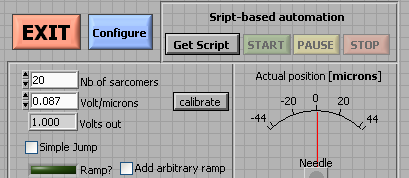
software\Libraries\Piezo. This program is also available from the Penguin_*.vi Instrument Driver, in the Displacement Calibration mode, by pressing the button Piezo Arm Calibration. Or from the Piezo_*.vi Instrument Driver, by pressing the calibrate button.
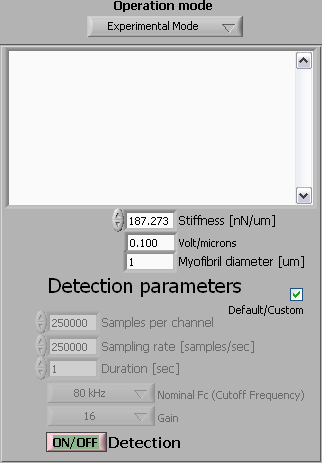
Using the Piezo Calibration program from the Penguin_*.vi Instrument Driver will transfer automatically the calibration factor directly to the Penguin, and the value will be used during the experiment. If you use the Piezo Calibration.vi program alone you need to manually input the calibration factor into the Penguin_*.vi Instrument Driver in the Experimental Mode, the Volt/microns control (see picture below). Once you input this value it is normally saved when you exit the program. If you want to make sure that the value is recorded, in case the program crashes, press the Configure control of the Penguin_*.vi Instrument Driver and close the configuration window by pressing the Back button. You don’t need to change anything in the configuration window, opening and closing it causes the program to save the controls of this driver in a log file
.
Going manual (a faster method)
If you don’t want to use the Piezo Calibration.vi application to calibrate the piezo you can simply do the calibration using the Piezo driver with the Image_CCD Camera driver, within the Principle Program or individually. The Image_CCD Camera driver MUST be calibrated! If it isn't use the Calibration of Camera document to see how to calibrate it. The idea is to use the microscope at 60X, having the needle tip in the field of view, and to move the needle with the piezo program (using a simple jump) a given distance, say 10 microns. With the measuring tool available on the Image_CCD Camera Driver put a 10 microns bar on the image, and match on of its ends with the tip of the needle. When you move the needle for 10 microns with the piezo, if the piezo would be well calibrated, the tip of the needle should arrive on the other end of the measurement bar. If this is not the case, you need to adjust the calibration factor, which is the “Volt/microns” control.
For questions and discussions please use this FORUM